Besides eight planets, our solar system has a huge number of smaller astronomical bodies, mainly asteroids, but also comets and dwarf planets. They are collectively called Minor Planets, and data about their properties are collected by the Minor Planet Center in a database. At the time of writing this blog, the monumental database contains 1,478,907 objects, with new discoveries added daily. Most objects are asteroids in the main belt between Mars and Jupiter, but there is an important subcategory, the Near-Earth Objects (NEO), that come close to Earth. Their number in the MPC database is now 40,146, also daily increasing. When asteroids in this category have orbits that cross the orbit of Earth, and are large enough to cause substantial damage in case of a collision, they are called Potentially Hazardous Asteroids (PHA). At the moment, their number is ~2500, with an estimated ~2000 not yet discovered.
This beautiful image, published by NASA in 2013, show the orbits of the ~1400 PHA’s, known at that time.
On 19 June 2004, the Pitt Peak National Observatory discovered a “new” asteroid. It got a provisional designation 2004MN4 in the MPC database. In a recent blog, I explained the coding used by MPC. The M stands for the 2nd half of June, the N for the number 13, and the 4 means 4×25. This asteroid was the 13 + 4 x 25 = 113th asteroid, discovered in the second half of June 2004.
But 2004MN4 was not an ordinary asteroid. After its orbit was calculated, it became clear that it was a NEO and even a PHA, with a small probability (2.7%) that it would hit Earth on 13 April 2029. More accurate calculations of its orbit showed that it would not hit Earth, although it would come very close, and there remained a possibility that it might hit Earth exactly 7 years later, on 13 April 2036.’ The asteroid got a permanent number in the MPC database (99942) and was given the name Apophis, the Egyptian god of the underworld, the enemy of the sun god Ra.
The possibility of a hit in 2036 remained a matter of concern, and in December 2009 I read in the Guardian about a Russian proposal to send a spacecraft to Apophis and modify its course away from Earth. The newspaper had this impressive artist’s impression of what could happen if Apophis were to hit Earth. Click on the image for a link to the Guardian article.
This was the first time I read about Apophis, and I was curious to know more. I had just started blogging, and in January 2010 I published my first post: Will the Earth be hit by Apophis in 2036? I got a few comments from readers and published a second post a few weeks later: Again Apophis, with more details and an explanation why in 2036 it would be again on 13 April.
In the following years, accurate calculations of Apophis’ orbit showed that also in 2036 the asteroid would not hit Earth, not even in the next 100 years. Actually, none of the known PHA’s will hit Earth in the next century!
But on 13 April 2029, less than 4 years from now, Apophis will pass Earth within about 30,000 km. That is closer than the orbits of the geostationary satellites. An asteroid crossing our own backyard, what a unique opportunity!
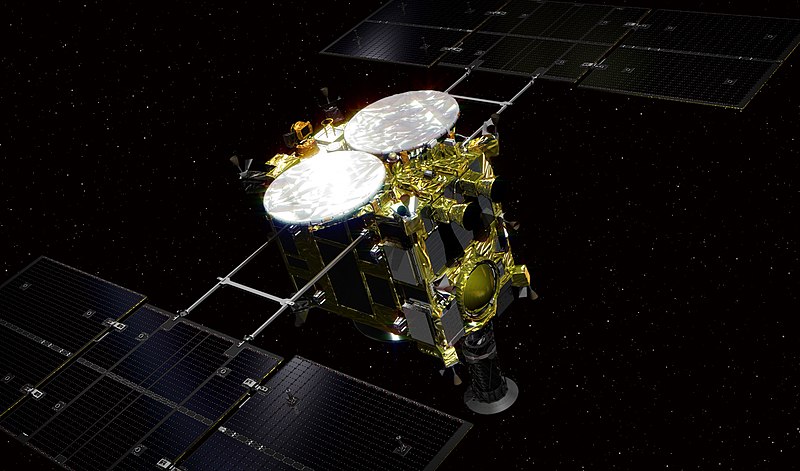
In July 2024, the European Space Agency (ESA) proposed a mission to Apophis. It got the name Ramses (Rapid Apophis Mission for Space Safety), to be launched between mid April and mid May 2028 and to arrive at Apophis in February 2029 . It would then measure properties of Apophis before, during and after the flyby. It would also deploy two so-called CubeSats, miniature spacecrafts. One of them might try to land on Apophis. Here is an artist’s impression of RAMSES, the two CubeSats and Apophis, about 30,000 km above the surface of Earth.
Preparations for the mission started in July 2024 with partial funding by ESA. In August 2025 JAXA, the Japanese Space Agency, decided to collaborate with ESA and received funding from the Japanese government. RAMSES will be launched on one of their rockets.
Would RAMSES receive full funding by the European Union? Those decisions are made by the ESA Council meeting at Ministerial level, this year held in Bremen, 27 November. The result:
Three missions have been approved. So It means green light for RAMSES, which now has to be built on a very tight schedule, within two and a half years! But it makes sense, because RAMSES is part of ESA’s Planetary Defense System. Apophis is not dangerous, but another asteroid might be in the future, and inthat case fast action is critical. It explains the “Rapid” in the name of the mission.
This will be the first post about RAMSES, just to celebrate that it has been funded.
It is generally assumed that you need liquid water for life to develop. The planet Mars is now dry and arid, but had lots of water in its far past.. The Perseverance rover (see my blog) is at the moment collecting samples of Martian soil, hoping to find fossil remains of (microbial) life, until now without results. Disappointing for those who are convinced that “simple” life must be ubiquitous in the universe.
When you have been following my blog, you will know that I am not really surprised. Personally I think that (simple) life will NOT develop easily, even in a suitable environment. See my recent post about the Drake Equation.
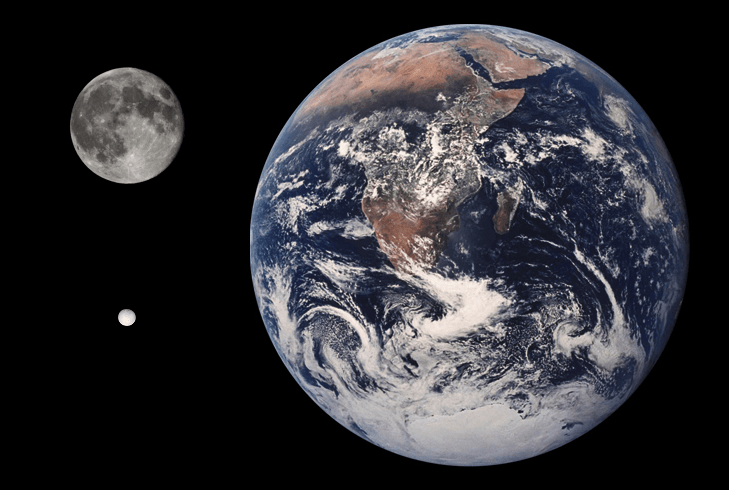
Are there other places in our solar system with (abundant) liquid water? Yes, there are, here are two, Europa and Enceladus. Europa is a moon of Jupiter and Enceladus a moon of Saturn. Europa is large with a diameter of 3122 km, only slightly smaller then Earth’s Moon (3475 km). Enceladus is much smaller, with a diameter of 504 km. In this image you see the relative sizes of Earth, Moon and Enceladus,
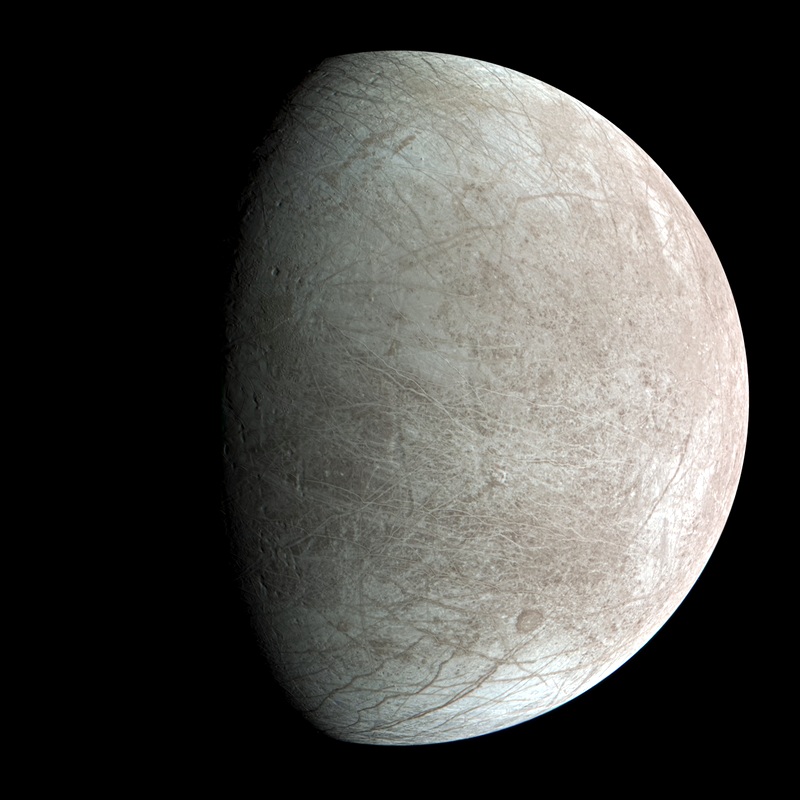
Here are the two moons, Europa left and Enceladus right.. Both moons are covered with a thick crust of water ice. This ice surface has a temperature of about -200 degree Celsius. But underneath this crust both moons have oceans of liquid water!
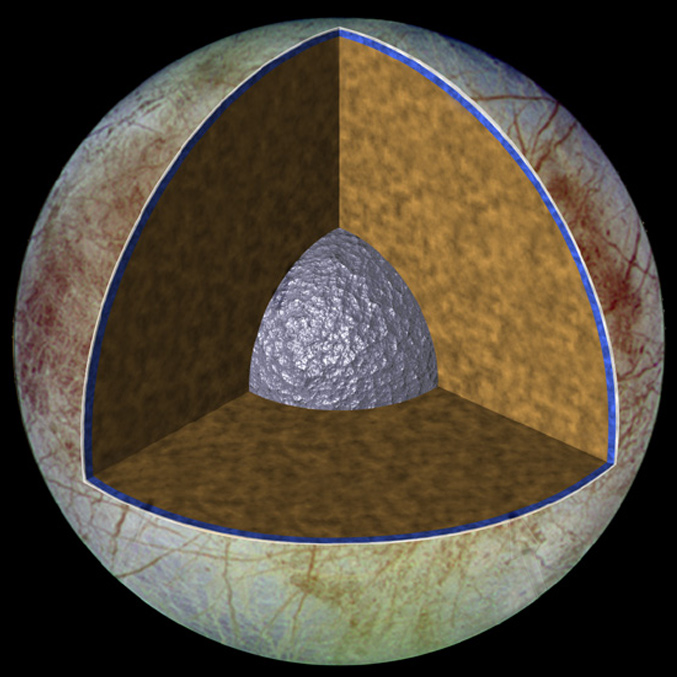
We think that the interior of the two moons look like this. Europa has a metallic core (iron and nickel),a rocky mantle and a (salty) ocean with an estimated depth of 60-150 km.. A thick ice crust ( 15-25 km) covers the ocean. The model shows the layers to scale.
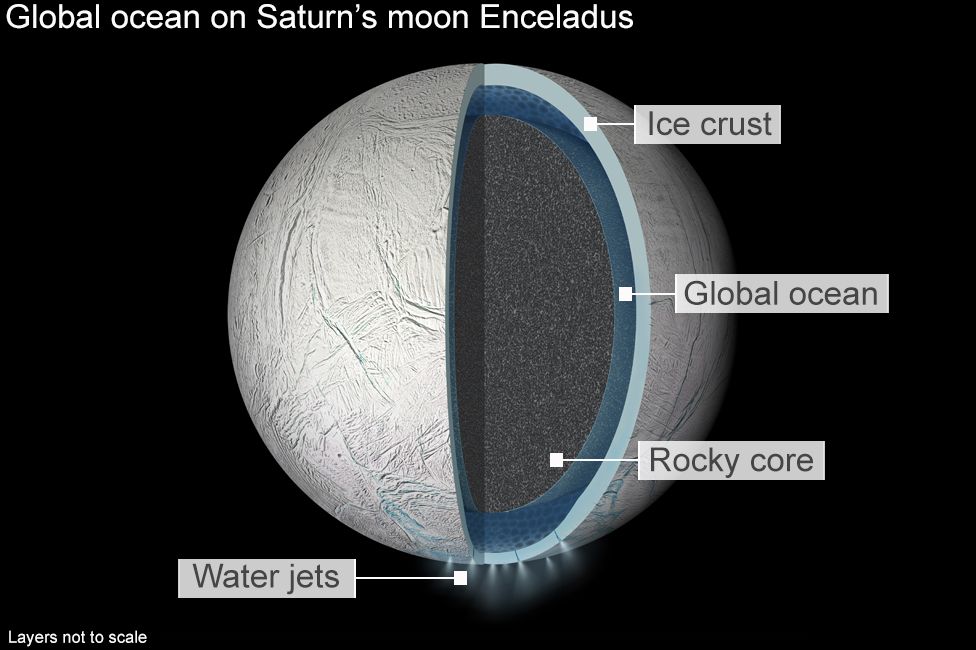
Enceladus has a rocky core with radius of ~ 180 km , covered by a 30 km deep ocean. and a 20 km thick crust. The ice crust is thinner at the south pole.
How is it possible that these moons have liquid water under their ice crust? Where does the energy come from, the Sun is far way. The answer is: because of the tidal forces exerted by the giants Jupiter and Saturn on their moons.
Newton’s gravitation between two objects depends on the distance between them. For example the gravitational force exerted by the Moon on Earth is stronger on the side facing the Moon than on the other side. This difference is responsible for the tides. The tidal friction will slow down the rotation of Earth , so the length of a day will increase a little bit, about 1,8 millisecond per century. In the far past when the moon was born, the day length may have been about 4 hours only!, For the moon the story is similar: tidal friction has slowed it down, even a lot more, the Moon shows always the same face to Earth, it is “tidally locked”. Actually all the major moons in the Solar System are tidally locked to their planet.
Even tidally locked moons still can undergo tidal flexing, if the orbit is elliptical, a kind of kneading. Model calculations for Europa and Enceladus indicate that this .can generate enough energy to keep the oceans liquid. More (technical) details here.
So both moons have liquid water and a source of energy , two of the essential ingredients for life as we know it. The third ingredient (chemicals like carbon, hydrogen, nitrogen, oxygen, sulfur, and phosphorus) should be available in the rocky core.
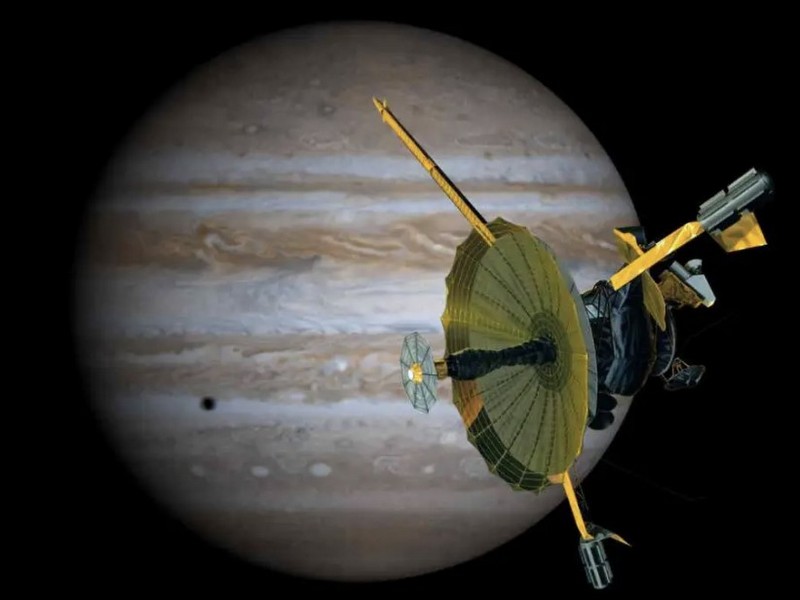
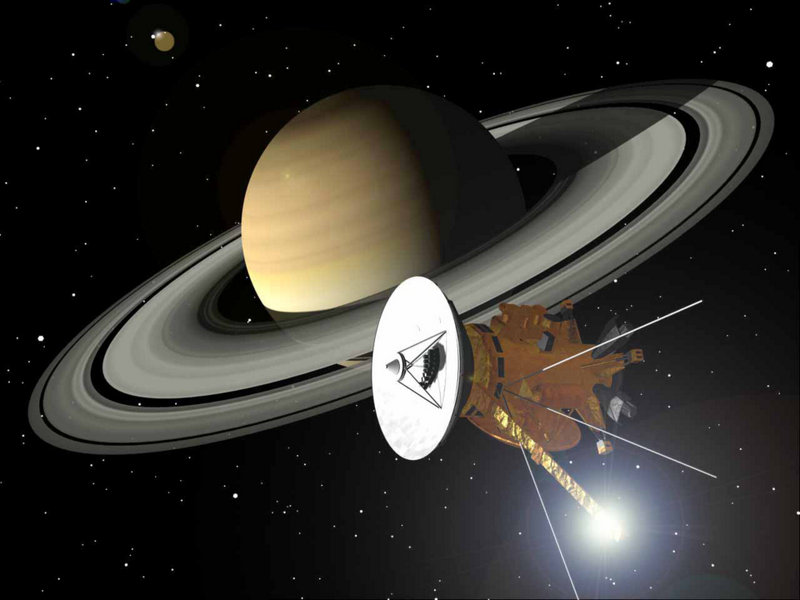
The information about the two moons comes basically from two successful space missions. The Galileo spacecraft arrived at Jupiter in 1995 and stayed in orbit until 2003. It’s main mission was to study the planet, but it managed to have numerous flybys’ of Europa. The Cassini entered Saturn’s orbit in 2004 and stayed there until 2017.
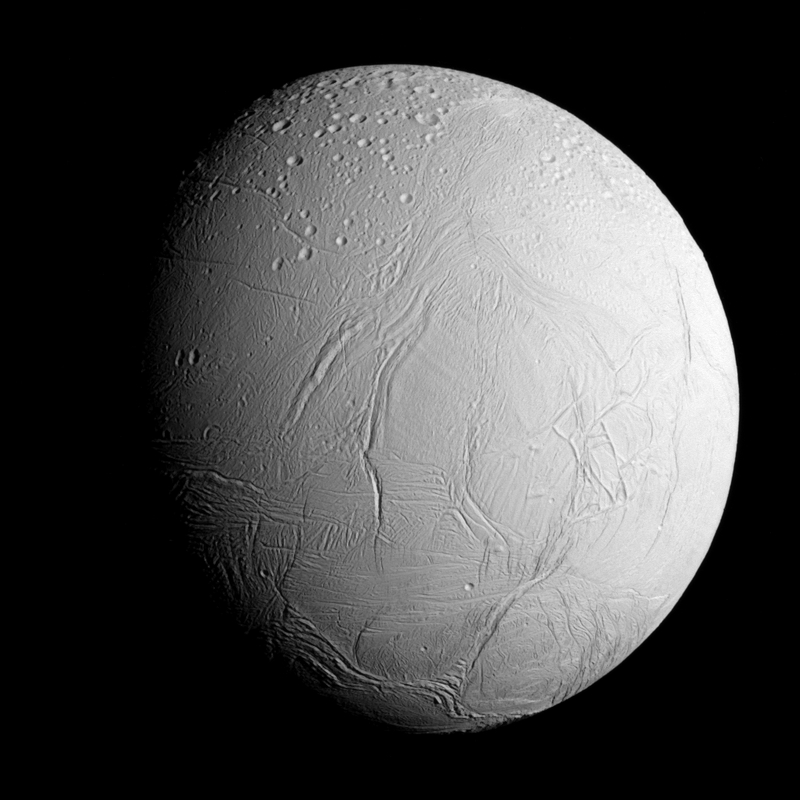
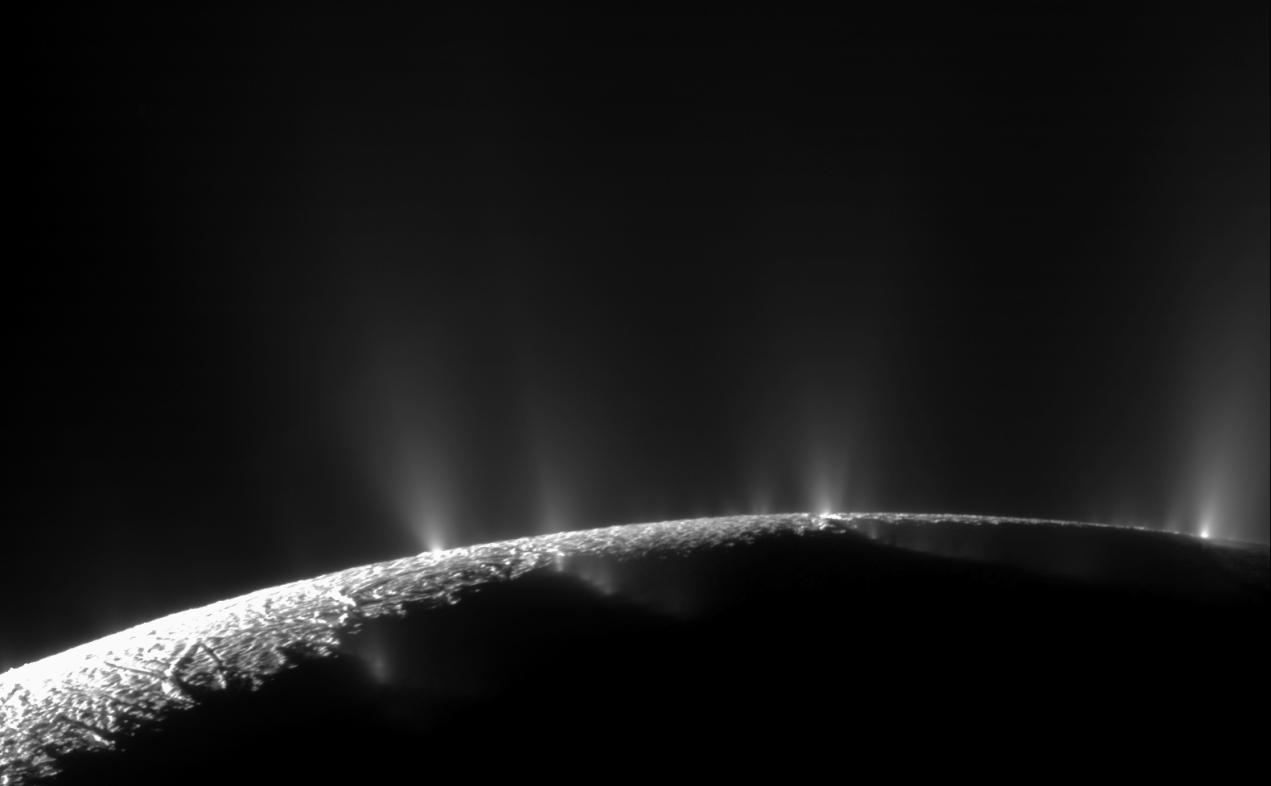
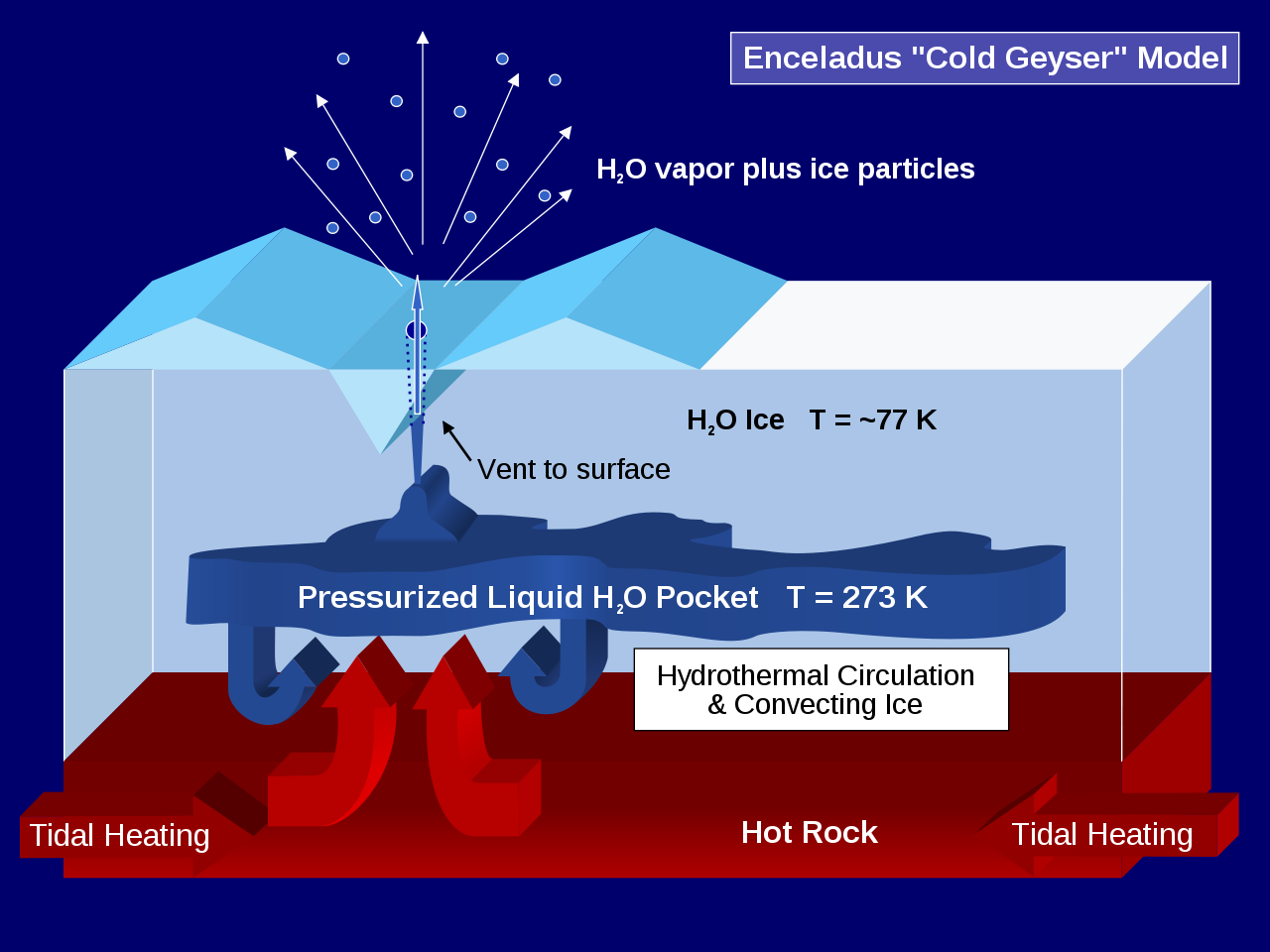
The Cassini mission was very successful, click here for an overview. One of the most spectacular discoveries was that Enceladus is an active moon. There are geysers in the south polar region of the moon! This picture was taken by Cassini in February 2010.
The geysers consist of water vapor and ice particles. The explanation is that water seeps from the ocean floor into the rocky core where it is heated. The heated water rises and erupts though fissures in the icy crust.. It is a bit similar to the hydrothermal vents in Earth’s oceans.
There are indications that Europa also has this kind of geyser activity, although less intense Here is a recent (2021) NASA report, Are Water Plumes Spraying from Europa?
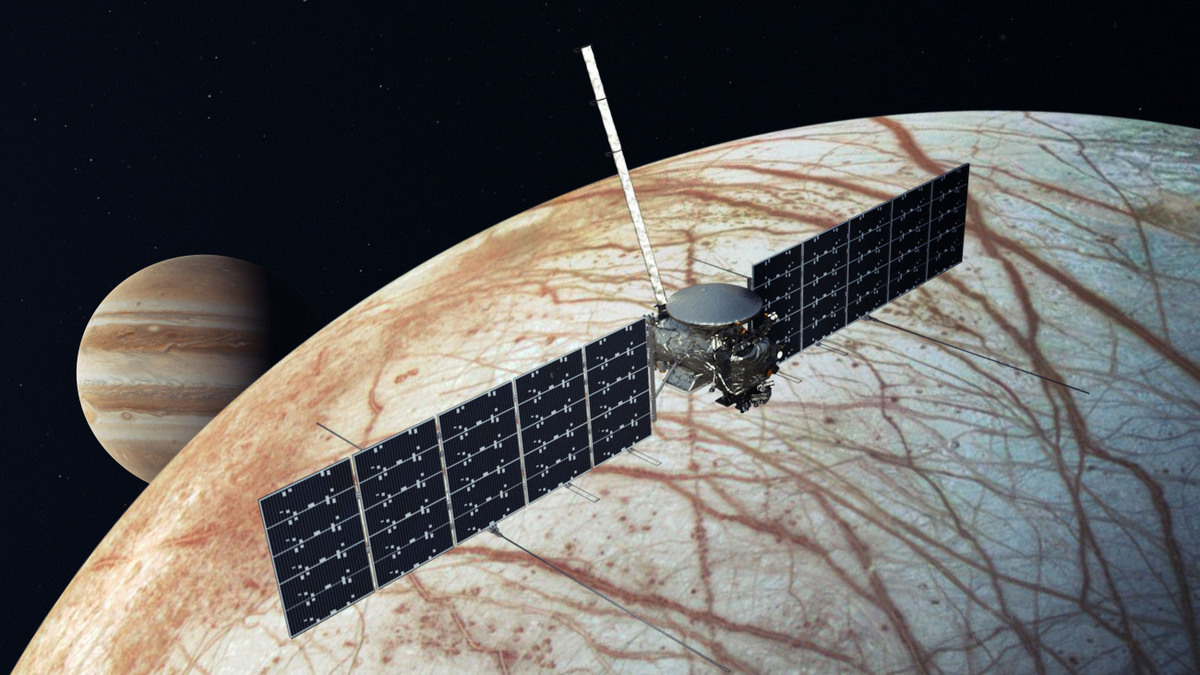
In the search for extraterrestrial life these two moons have top priority. Many proposals for missions to Europa have been formulated and later discarded, here is a list. At the moment the Europa Clipper is being prepared for a launch in October 2024. It will arrive at Jupiter in April 2030. Here is an artist’s concept, of Clipper, Europa and Jupiter. The solar panels of Clipper span 30 meter!
The artist impression might suggest that the Clipper will orbit Europa, but that is not the case, it will orbit Jupiter in an elliptical orbit and make 44 flybys of Europa. It will study Europa’s icy crust, find confirmation for the ocean underneath and try to make flybys through the geysers (if they exist).
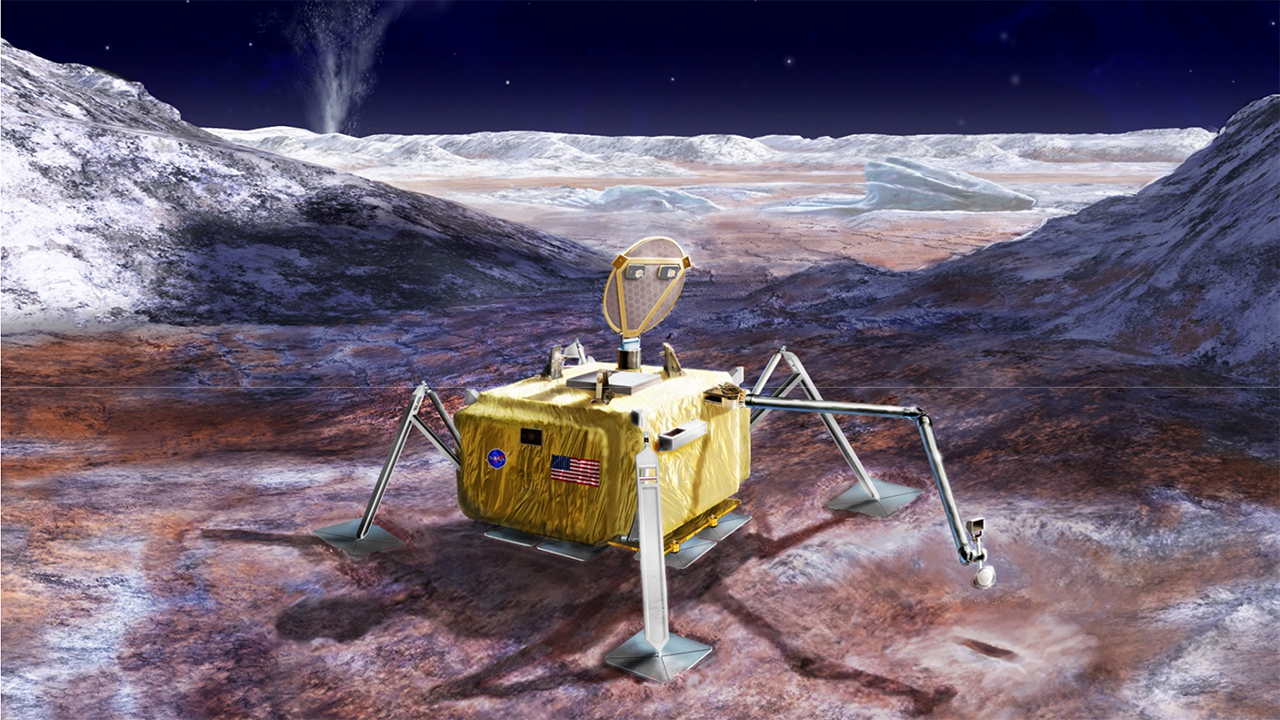
A proposed follow-up mission is the Europa Lander. It would land on Europa, collect some material from the icy crust and search for biomarkers, signs of life. Here is another artist impression. Notice the geyser at the horizon 😉 .
Probably the Europa Lander mission will be cancelled. Why? Because Enceladus offers better options than Europa. The main difference is that Enceladus is continuously spewing water and ice crystals, whereas the geysers of Europa are sporadic and still have to be confirmed.
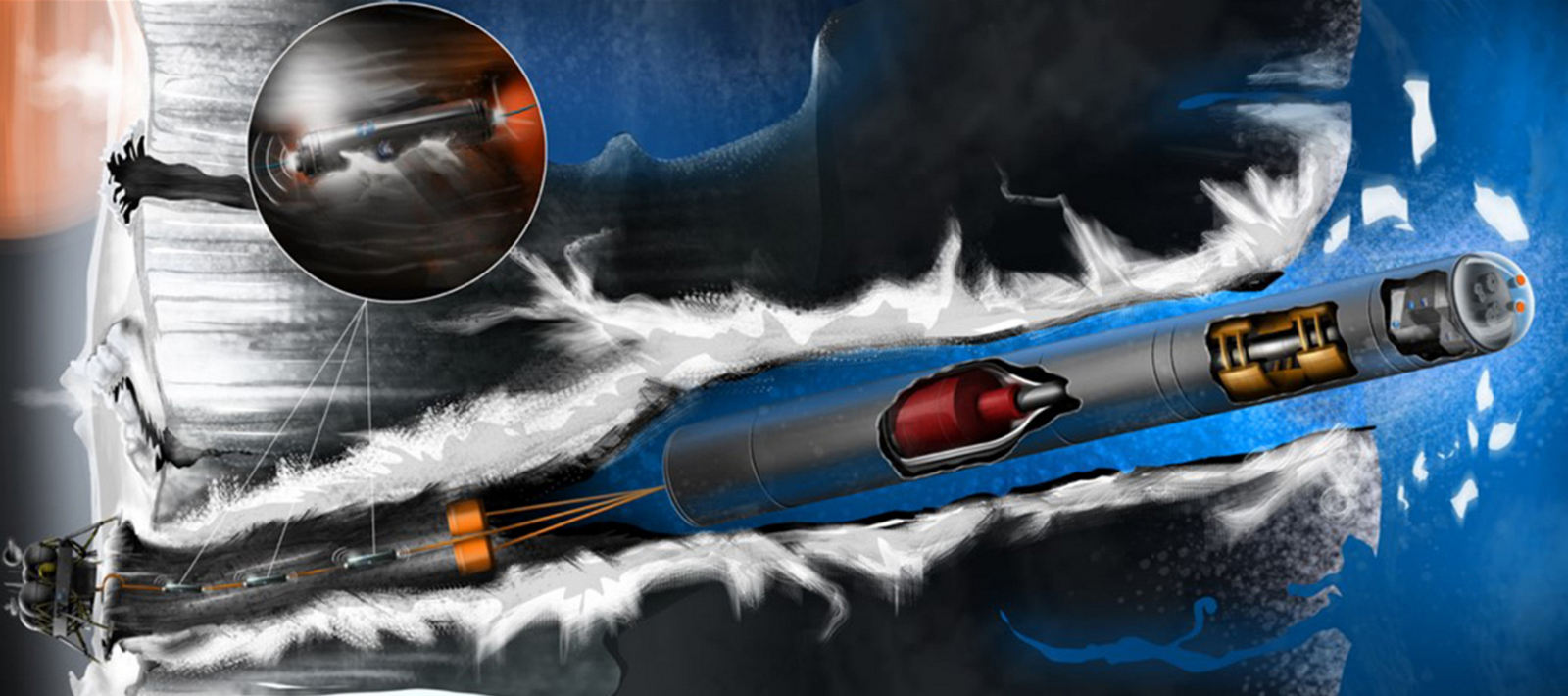
The reason that there is so much interest in the geysers is obvious. To find out if there is life in these oceans, we have to drill through a 15-25 km thick ice crust first. Actually there are studies how to do that, they read like science fiction. Here is the final report (pdf file, 70 pages, 2019) about the Europa Tunnelbot. The basic idea is that this tunnelbot would melt itself down through the ice crust of 20 km in 3 years time, to reach the ocean. Here is a artist impression from the report, I have rotated it 90 degrees, to fit better in this post. Left is the icy surface of Europa, the inset shows three “repeaters” because even when the bot reaches the ocean it still must transmit date to the lander.
Science fiction and I think it will never happen, because the geysers on Enceladus and possibly on Europa may already give information about life in the oceans below the crust!
After Cassini observed the geysers on Enceladus, the scientific program was adapted and the spacecraft went a few times through the plumes. It found water, ice crystals and organic compounds!
So that will be the program for the next decades, explore Enceladus and find out whether the geysers will have convincing biomarkers.. .
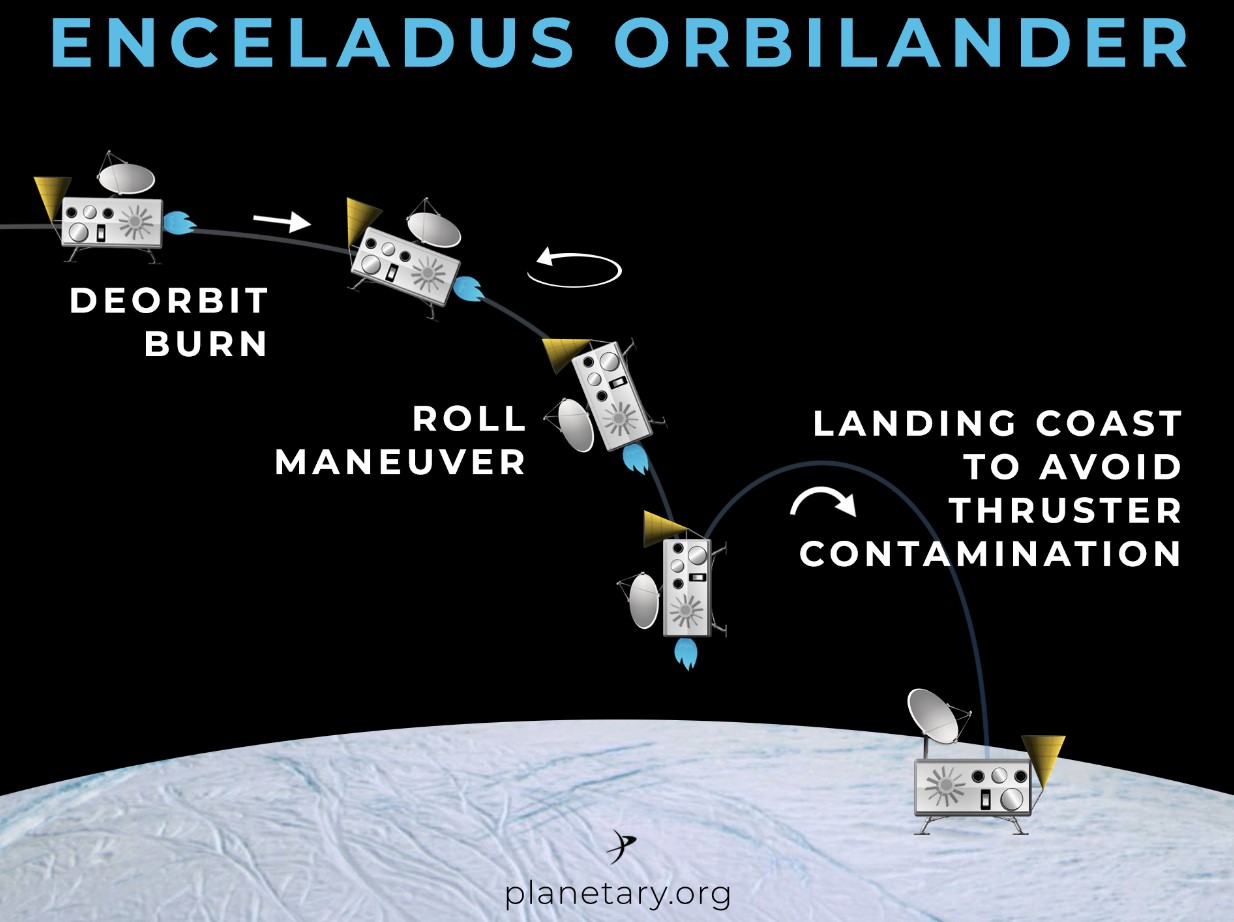
Of course it will take time to design Enceladus missions. Here is one, the Enceladus Orbilander. Approved as a so-called Flagship Mission. Still in the design phase. possible launch in the late 2030s Arriving at Enceladus in the early 2050s.
First it will fly numerous times through the geysers, collect material and analyse it. Then it will land at the South polar region.
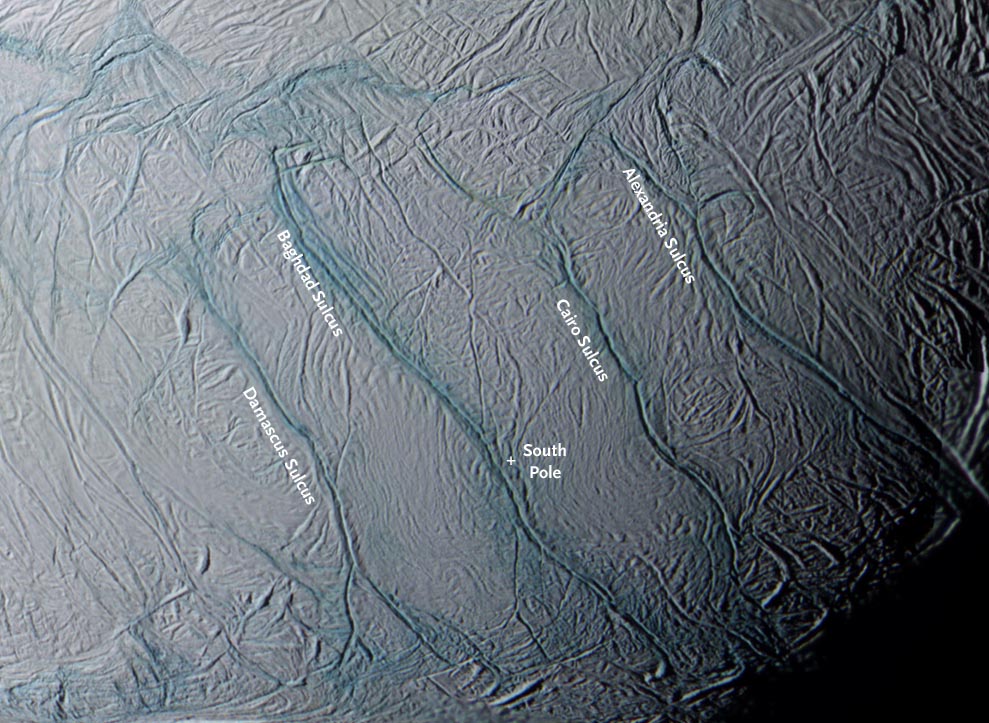
This is the South polar region of Enceladus. The “tiger stripes” are fissures in the ice crust where geysers erupt.
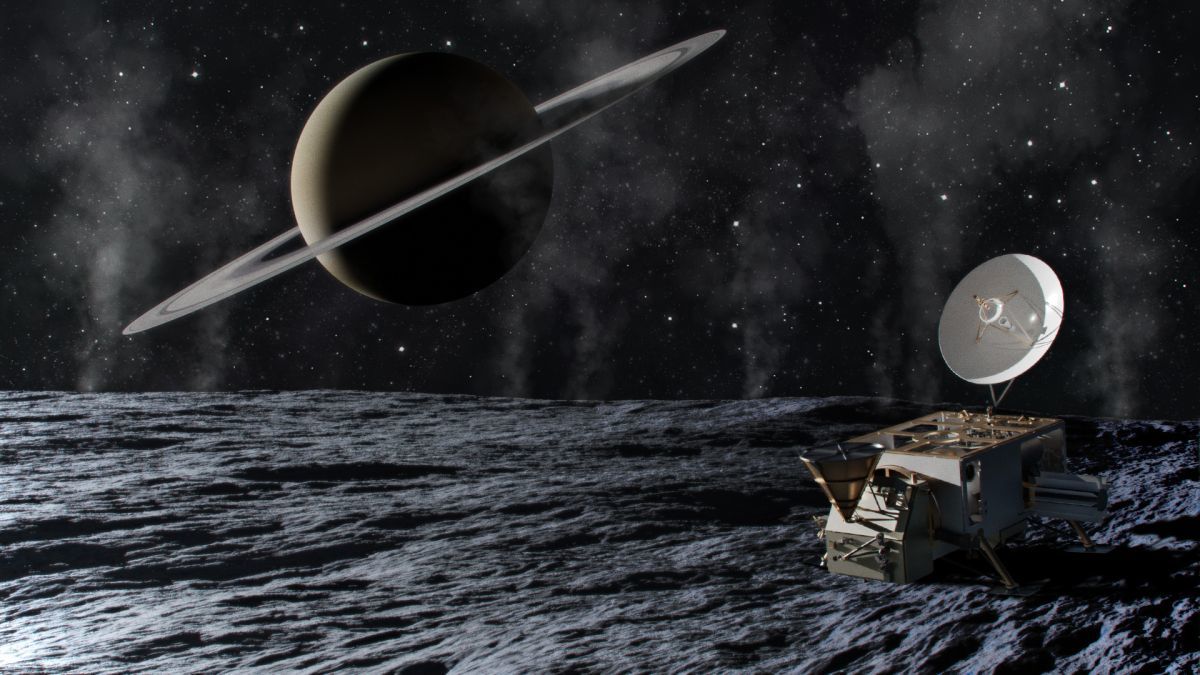
And here is an artist impression of the Orbilander on the surface of Enceladus.
Until now life has only be found on Earth. Discovery of (primitive) life elsewhere in our solar system would be dramatic, because in that case we would know that (intelligent) life is ubiquitous in the universe.
At the moment Perseverance is collecting soil samples on Mars which will be brought back to Earth by the Mars Sample Return Mission around 2033. At about the same time Clipper will explore Europa. So we will have to wait for 10 years and for results from Enceladus about 30 years.
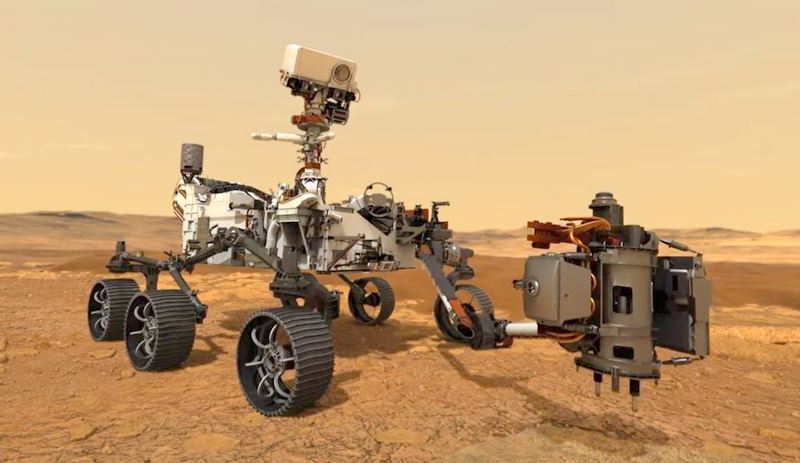
On 18 February 2021 the Perseverance rover landed successfuly in the Jezero crater on planet Mars. A few weeks later I wrote a detailed blog about the landing and the mission of the Perseverance: to determine whether Mars ever was, or is, habitable to microbial life. We are now more than two years later, time to give an update. I assume that you have read the first post ;-).
First about the Ingenuity helicopter. There has been a lot of opposition to include the helicopter in the project, many people were worried that it might compromise the main goal of Perseverance. Here are two pictures taken by the WATSON camera (mounted on the robotic arm). Left the Ingenuity still under Perseverance’s belly with its legs unfolded, right next the the rover, ready to fly. Photos taken 1 and 7 April 2021, respectively
Here is a selfie of Perseverance, taken on 6 April 2021 again by the WATSON camera. Notice how small the helicopter is. Do you wonder why you don’t see the robotic arm in this picture? Actually WATSON took 62 pictures, resulting in this composite image, click here for details.
Originally only 5 flights of Ingenuity were planned, just to test if the helicopter could fly in the very thin Martian atmosphere. Because contact with Earth takes about 11 minutes, those flights have to be autonomous. They were so successful that the Ingenuity is still operating now, on 23 April it had its 51th flight. It is actually scouting for Perseverance to find suitable locations to explore. Click here for a list of all flights, full of interesting details. During flight 51 Ingenuity took a picture of Perseverance (upper left corner). Not easy to spot, the right picture shows an enlargement
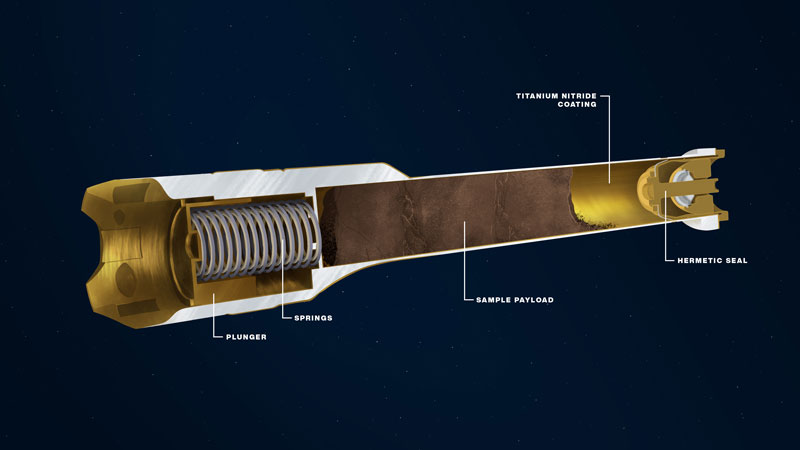
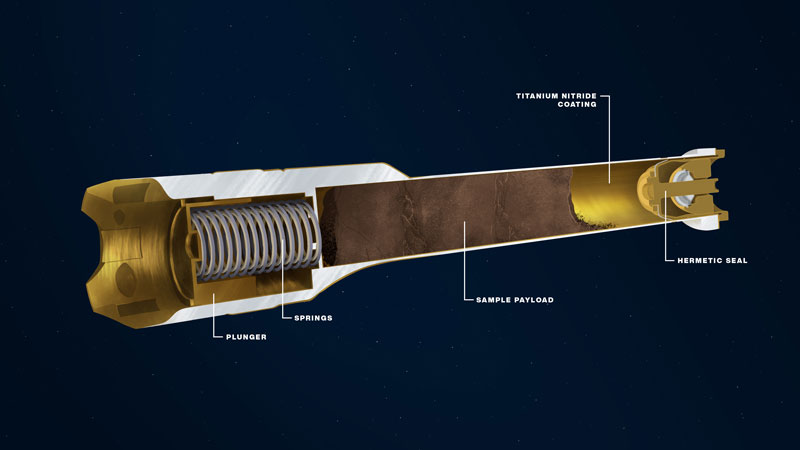
In my Perseverance blog, I could only be rather vague about details of the mission. The rover was supposed to collect samples of Martian rocks and soil (regolith), using the drill on its robotic arm. Then put these samples in sample tubes and store them in a container. Here is an example of a sample tube, the container can hold 43 of them.
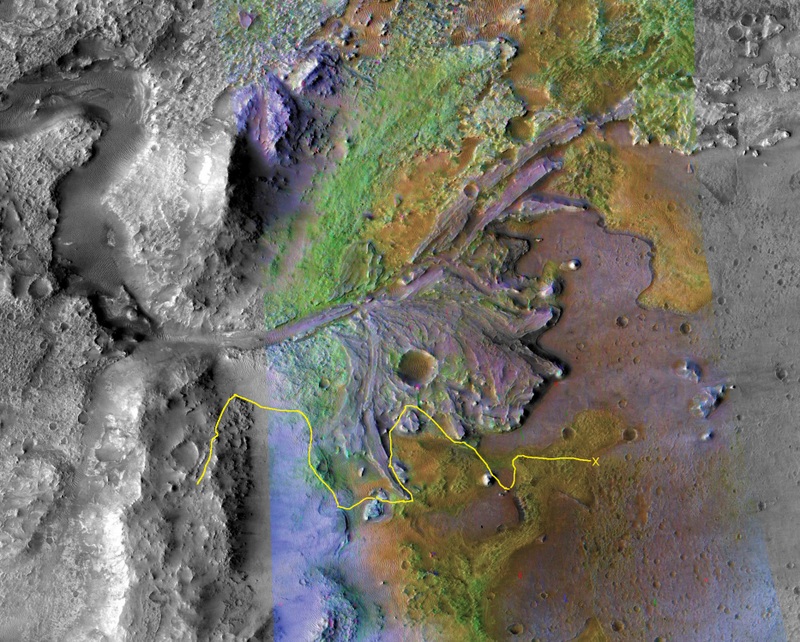
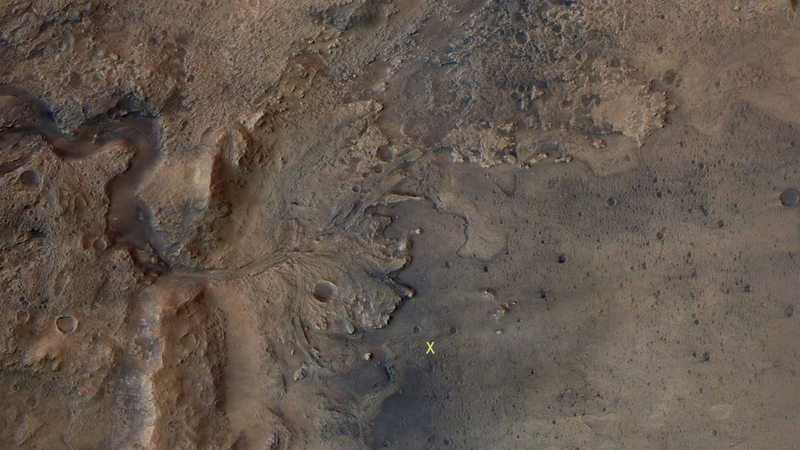
Here is the proposed route at the time when I wrote my blog.. The x marks the landing of Perseverance in the Jezero crater, which was a lake, billions of year ago. In those days a river was flowing into the lake (from the left), creating a delta of sediment. If ever life developed on Mars, this region might be suitable to find proof of it.
And here you see the actual route of the rover during the last two years. It is a screenshot from the NASA website Where is Perseverance? Really worthwhile to visit the site, you can zoom in on the map which is updated regularly. The red markers give the locations where samples have been collected. The blue markers show where the Perseverance and the Ingenuity are.
When you visit the website and zoom in, you will get this. Clicking on a white circle will tell you when the rover was there, clicking on a line segment gives the distance, clicking on a red marker will tell you the number of the sample collected
During the two years that Perseverance has been exploring, it has collected 19 samples, here is the list, with lots of details for each sample.
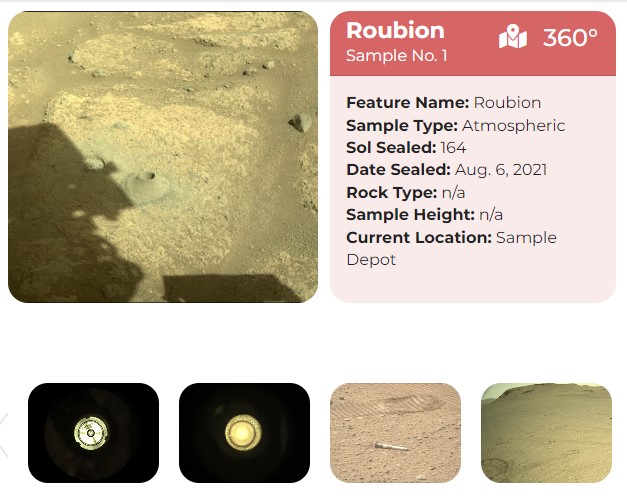
The first sample was actually a failure, it must have been a shock for the team! Here is a screenshot. Sample Type: Atmosopheric. The core must have been too powdery/brittle, broken into pieces, and the capsule is empty. More about it here .
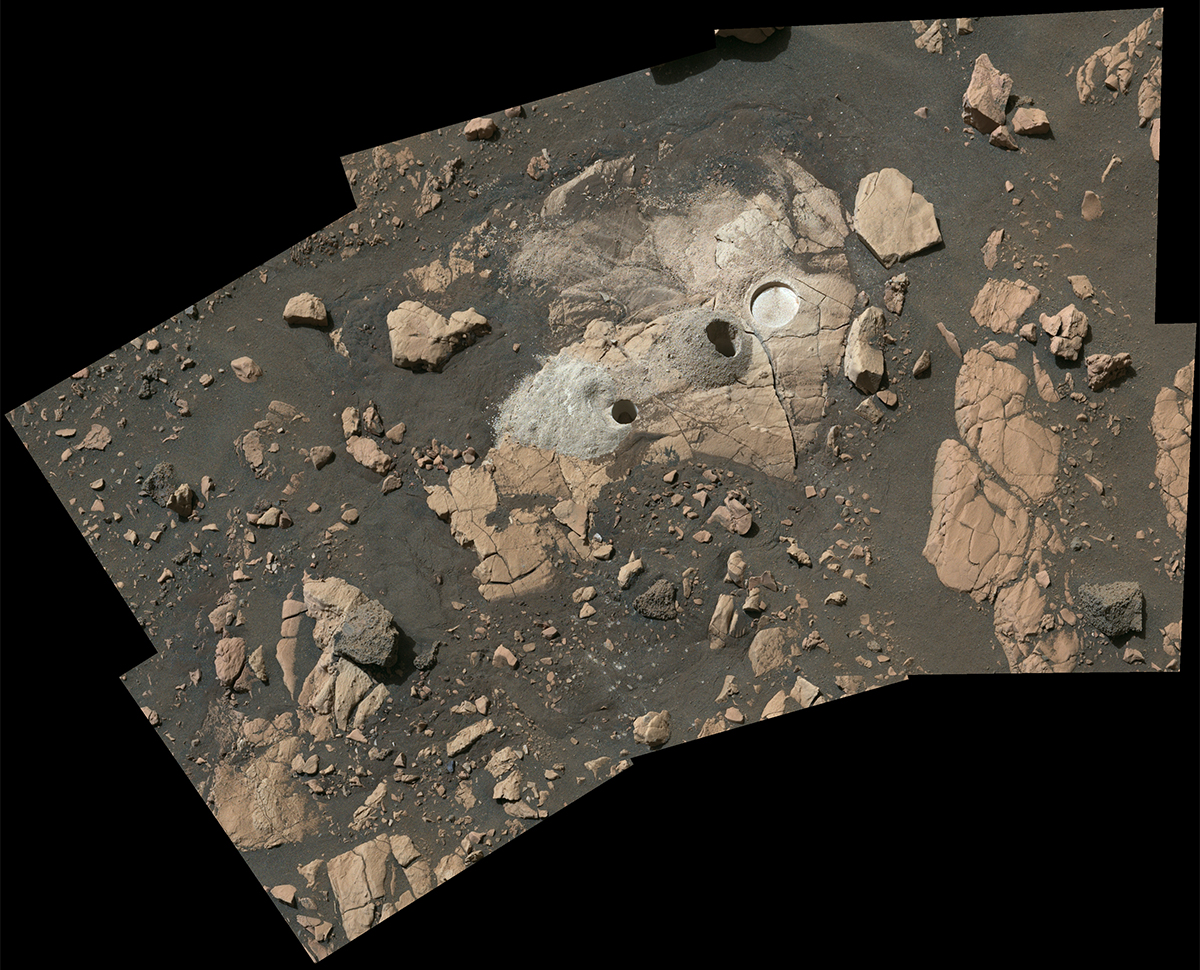
Fortunately all other sampling attempts until now were successful. Here is an example. The rocky outcrop has been named Wildcat Ridge. Two samples (no 12 &13 in the list) have been drilled and a circular patch of the rock has been abraded to investigate the rock’s composition.
Why two samples from the same location? When you look at the list, you will find that this is the usual procedure. All samples have been collected twice from each location (except the first, failed, one).
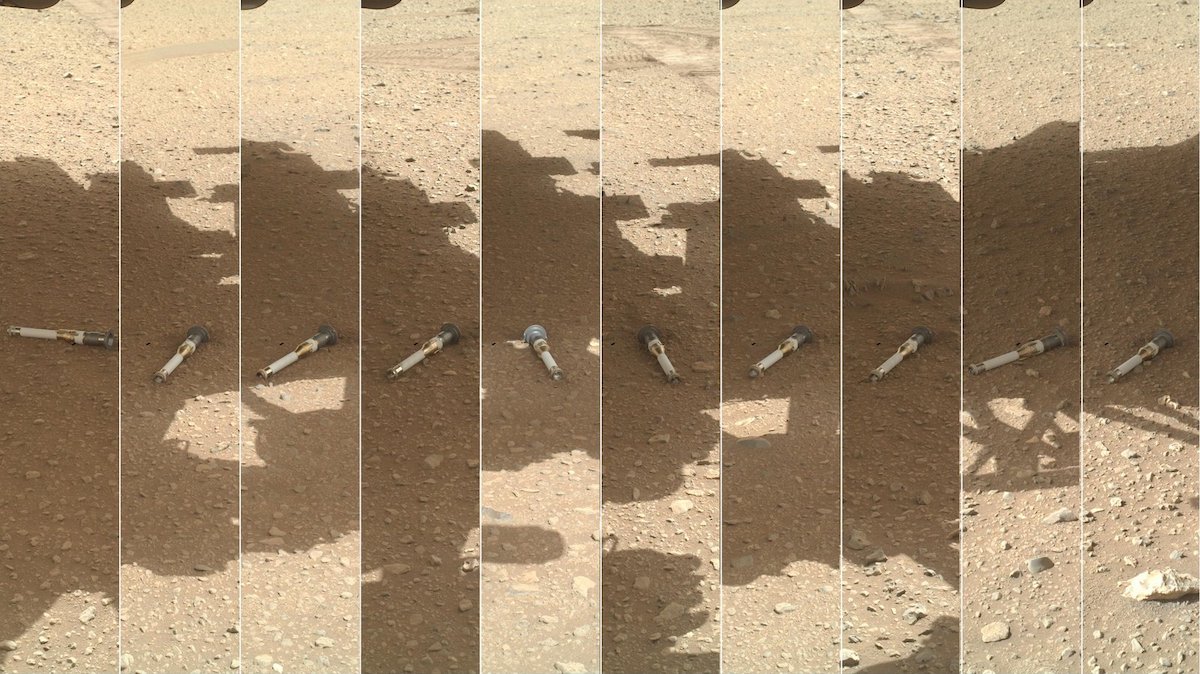
In the period between 21 December 2022 and 28 January 2023, one sample of each location has been dropped in what has been called a depot, named Three Forks. I have indicated the location with a red oval in the detailed map above. Here is a picture of the second sample being dropped.
And here is a collage of all 10 samples dropped. THe Atmospheric sample, 8 samples with rock or regolith and one witness sample. A witness tube will follow the same procedure, but not collect any rock or regolith. Back on earth it will be inspected to check for any contamination with material from Earth. Click here for more details.
,The sample tubes tubes are not dropped at the same spot, but about 5-15 meter apart. The center of each circle is the location where that sample was deployed, with in red the name given to the sample (see the list).
Why all this? Basically for safety reasons. The ultimate goal of the mission is to bring the sample capsules back to earth, where they can be studied in much more detail than is possible by Perseverance. In my first blog I wrote that this so-called Mars Sample Return porjectat first sight looks like science fiction. And I still think it does 😉 . Here is an outline of the project in its present form.
In 2027 the Earth Return Orbiter (ERO) will be launched and reach Mars in 2029 where it will go in orbit and wait for the container with the samples.
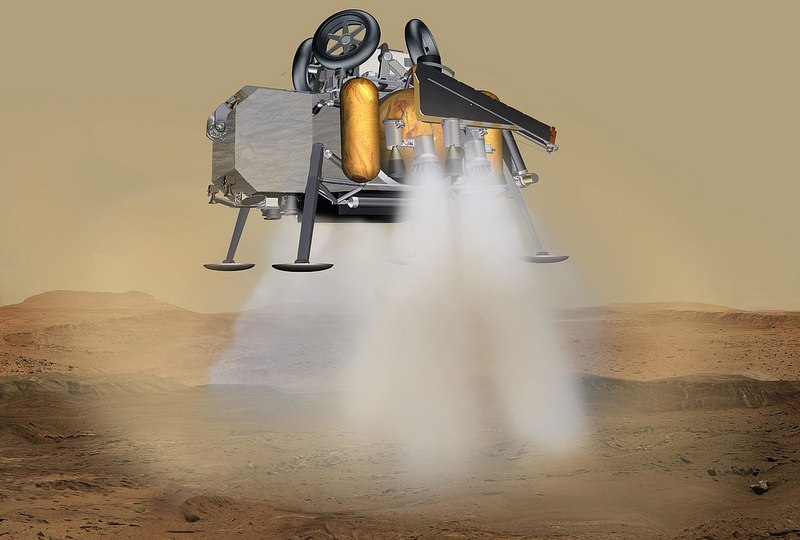
In 2028 the Sample Retrieval Lander (SRL) will be launched. It will land on Mars in 2029, probably close to the Three Forks depot. It will bring two helicopters and the Mars Ascent Vehicle (MAV), a rocket.
If Perseverance is still working properly, it will also travel back to the Three Forks depot. In that case it can transfer its samples to the MAV
If not, the two helicopters will transfer the ten dropped samples to the MAV
After the samples have been stored in the MAV, it will leave Mars, go in orbit around the planet and release the container with the samples.
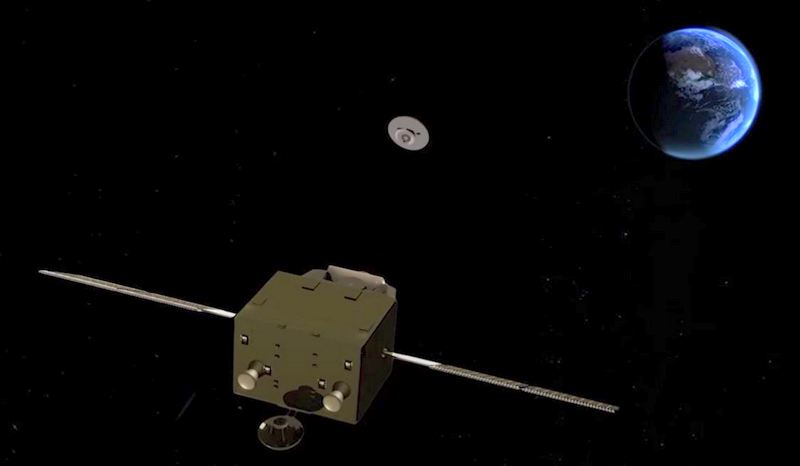
The ERO will pick up the container with the samples and place them in the Earth Entry Vehicle (EEV). Then it will leave its orbit and travel back to Earth
Near Earth the ERO will release the EEV which will “fall” back to Earth. No navigation, no parachute. It is scheduled to land in 2033 in the desert sand of the Utah Test and Training Range.
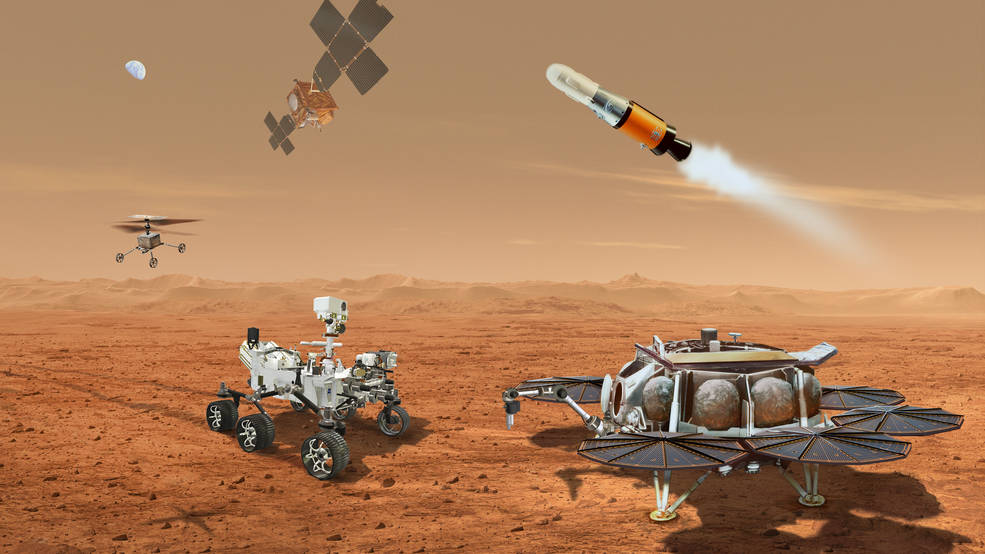
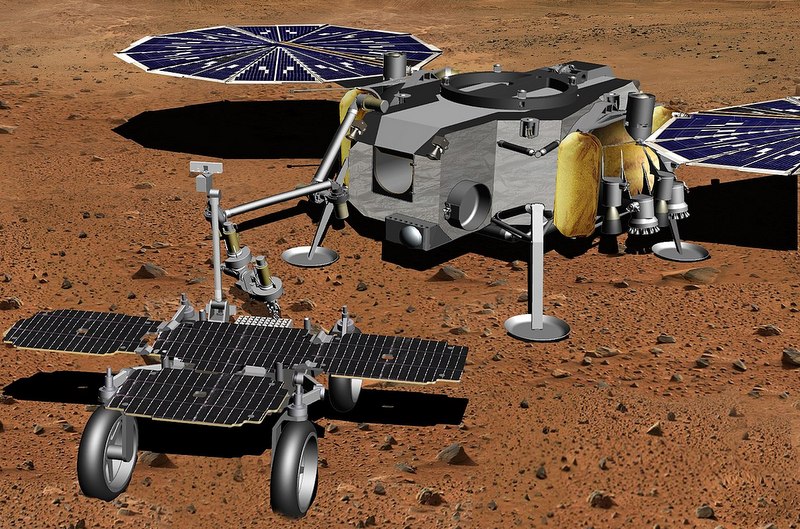
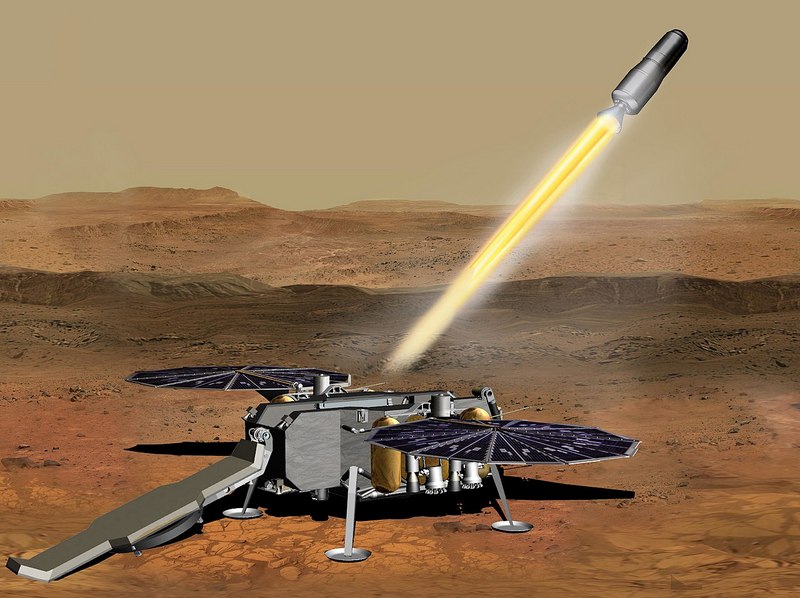
In this artist impression the Sample Retrieval Lander is at the right, left the Perseverance. The Mars Ascent Vehicle has just been launched, it will bring the container with the precious samples to the Earth Return Orbiter. One of the Sample Recovery Helicopters is hovering in the thin Martian atmosphere.
In the original design, the Sample Retrieval Lander carried another rover which transported the sample tubes from Perseverance to Mars Ascent Vehicle. . It has been skipped because of the success of the Ingenuity helicopter. The Sample Recovery Helicopter has basically the same design, but is stronger, can carry a small load and has wheels. Here is an artist imprssion. It can transport a dropped sample tube, one at a time, from the depot to the Lander.
.Another design change is that the Sample Retrieval Lander has a powerful robotic arm to put the samples in the sample container. Have a look at this fascinating video. The robotic arm picks up a sample tube from the ground, and puts it inside the rocket. But it can do the same with samples stored inside the Perseverance.
Have a look at this animation. You see the Sample Retrieval Lander land near the Perseverance. The robotic arm transfers the sample capsules to the Mars Ascent Vehicle, which is then launched. When in orbit it releases the container with the samples. This container is then collected by the Earth Return Orbiter. There the container will be placed in the Earth Entry Vehicle. All this will take place after the landing of the Sample Retriever Lander in 2029.
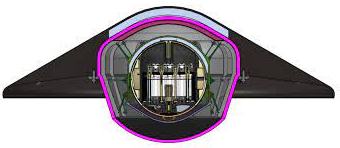
At the moment the whole whole retrieval mission is still in the design phase. Here are prototypes of the sample container and the Earth Entry Vehicle. To give you an impression of the size, a sample tube is about 15 cm long. The container is roughly the sise of a basketball. The diameter of the EEV will be about 1.5 meter.
The retrieval operation will take place in 2029, six years from now. The Perseverance is working beyond expectation, but will it still work properly in 2029? In the first phase of the exploration Perseverance has collected dupilcate samples and dropped one of each at the Three Forks depot. In one of the NASA reports I read that in the second phase the Perseverance will no longer collect duplicates.
So, when everything goes well, in 2029 Pereverance will return to the Three Forks Depot with in its belly around 30 collected samples. In that case The Robotic Arm will transfer the samples to the sample container. It will leave the depot untouched! Why? Because the retrieval will be a risky process. The container after launch will be floating in orbit and hopefully collected by the Earth Retrun Orbiter. And near earth the container, now inside the EEV, will be dropped near Earth and hopefully fall down in the Utah desert. I still think it’s science fiction 😉 So, in case something goes wrong, at least there are still 10 samples in the depot, waiting for another mission.
The paragraph above is my own interpretation.
And this is my personal comment, before I finish this blog.
The whole mission until now has been presented as a huge success. And techologically speaking, I agree. But still I think the scientists will be a bit disappointed, because a “smoking gun” has not been found until now.
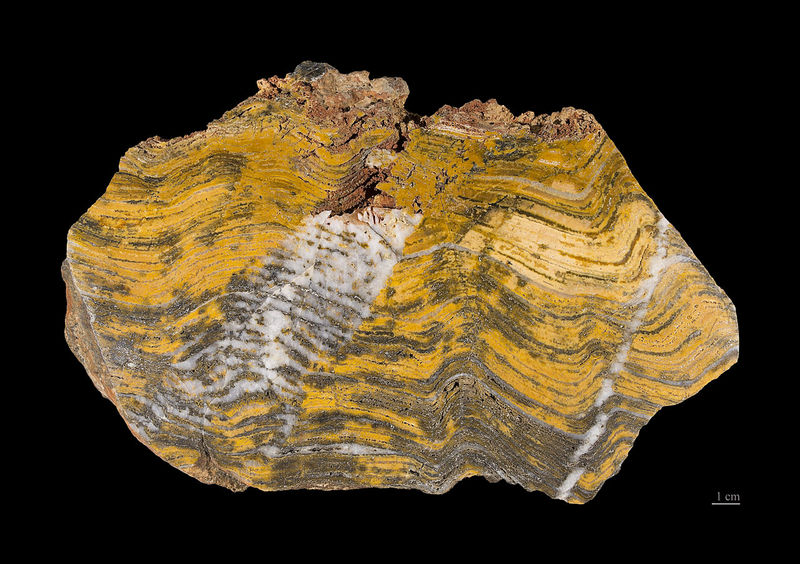
When (microbial) life developed on earth, 3.5 billion year ago, it left fossil traces behind, called stromatolites, like this one, found in Australia..
Stromatolithe – MNHT
If this kind of sediment would be found in the Jezero crater om Mars, it would be frontpage news all over the world: Life has existed on Mars.
In 2019 a team of NASA/ESA scientists went to Australia to study the stromatolites. In the video they call them the Holy Grail.
But until now no sign. The collected samples contain organic molecules, but that is nothing new, Curioisity, the predecessor of Perseverance already found them.
Of course Perseverance will persevere exploring the sediments in the Jezero delta and collect more samples. Hopefully it will one day be able to take pictures of stromatolite. If not then we will have to wait until 2033 when the samples are returned to Earth and can be investigated in specialised laboratories.
Yes, I think the scientists are a bit disappointed.
Are you staying up tonight?, a friend asked me a few weeks ago. No, why? , I replied. He knows about my interest in space travel and expected that I was aware of the landing of a spacecraft on Mars that night. But I was not 😉
I checked the timing, the Perseverance would land at 4:55 am in the morning of 19 February (Malaysian time). In this blog I will explain why I decided to enjoy my sleep and check the next morning if the landing had been successful 😉
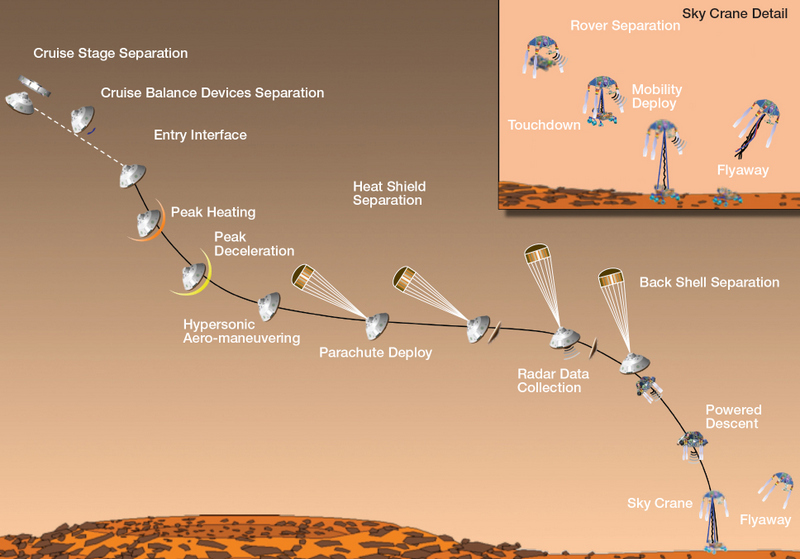
In 2018 I wrote a blog Landing on Mars, in which I described the various Mars missions, concentrating on the Curiosity Mission of 2012. The procedure to land the Curiosity was new, using a so-called sky-crane for the last phase.
Here is a diagram of what is called the Entry, Descent and Landing (EDL) process. The spacecraft enters the (thin) Martian atmosphere with a velocity of ~ 20.000 km/h. About 7 minutes later it must land on the surface with a velocity of less than 1 m/s. As signals between Earth and Mars take about 11 minutes, EDL can not be controlled from Earth, the whole process must have been programmed in the computers on board. Mission Control can only wait and see. That’s why these 7 minutes have been called the seven minutes of terror.
In my 2018 blog I describe the three phases in more detail, here is an very informative animation.
In 2012 everything went well, the Curiosity is actually still operational at the moment, much longer than originally planned.
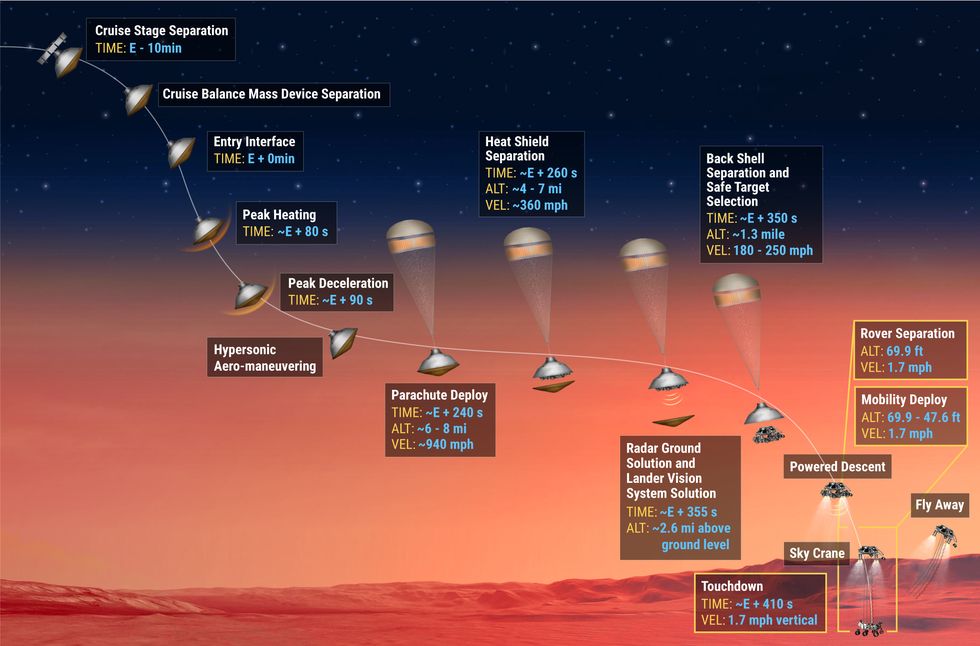
The Perseverance that landed last week, has followed the same EDL procedure. Of course it must have been a relief for Mission Control that it was again a smooth process, but to keep calling it seven minutes of terror is exaggerated. That’s why I decided to enjoy a good night’s sleep. Here is the EDL process for the Perseverance. As you see it is basically the same as for Curiosity.
The two rovers also look the same. To the left Curiosity, the official name of the mission is Mars Science Laboratory (MSL). The Perseverance, to the right, is part of the Mission 2020 project.
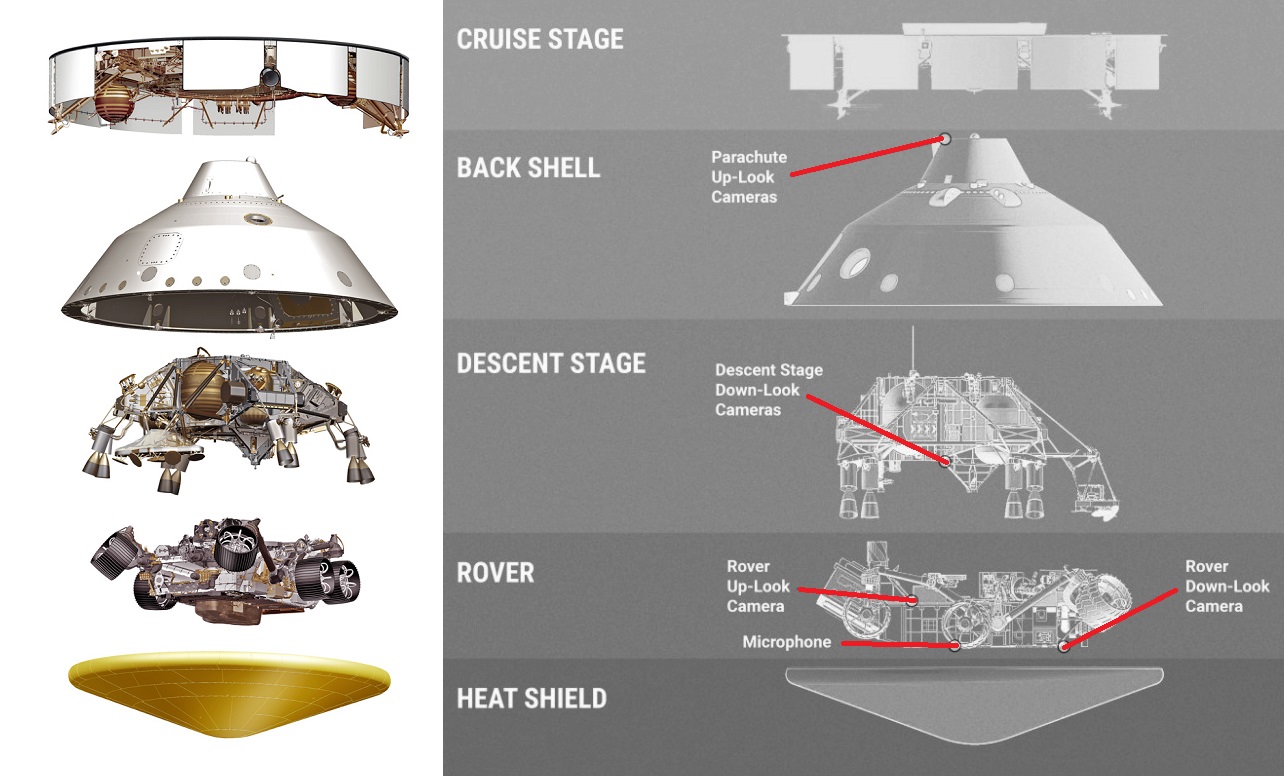
Of course there are differences. The wheels have been redesigned, the robotic arm is heavier and the rover carries more cameras, 23 in total. Notice the “hazcams” at the front and the back of the rover, to avoid obstacles. Sherloc, Watson and Pixl are science cameras, I will tell a bit more about them later.
Some of the cameras have not a real science function, but have been added mainly to please the general public 🙂 . The back shell has a camera looking up to see how the parachute deploys. The camera of the sky-crane is looking down and can follow how the rover is being lowered to the ground. And the rover has a camera looking upwards to see the sky-crane. And a camera looking downward to the ground. That one is important, the spacecraft has a digital map of the surface and uses the camera images with a lot of AI to steer to the right location.
Keep in mind that all these images can only be transmitted back to Earth, after the spacecraft has landed. During the EDL, Mission Control only receives telemetry signals (altitude, speed etc). NASA has published a spectacular video where those messages are combined with the camera images. This is a YouTube video your really should watch (several times!). No wonder that this video has already been viewed more than 14 million times.
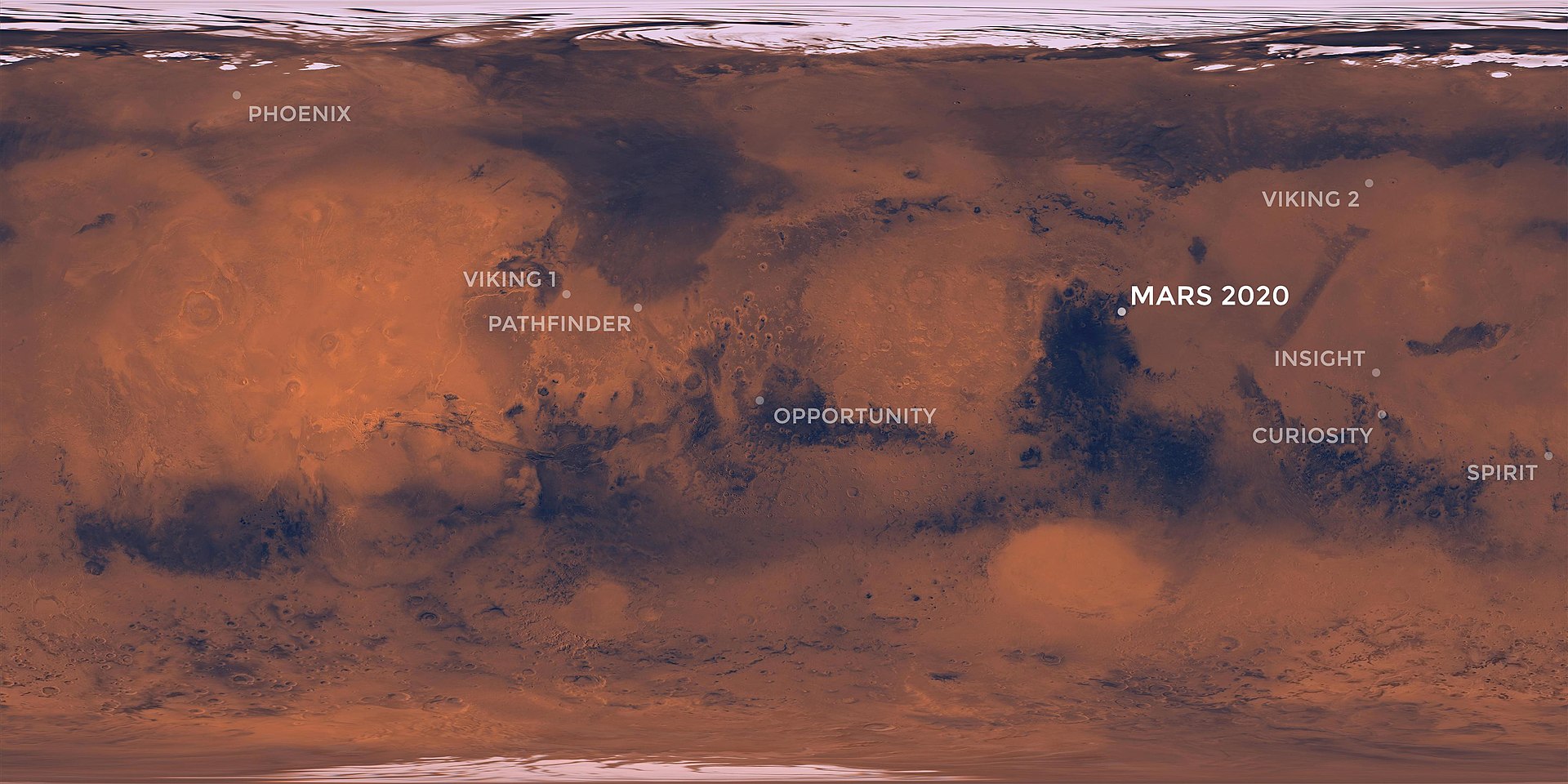
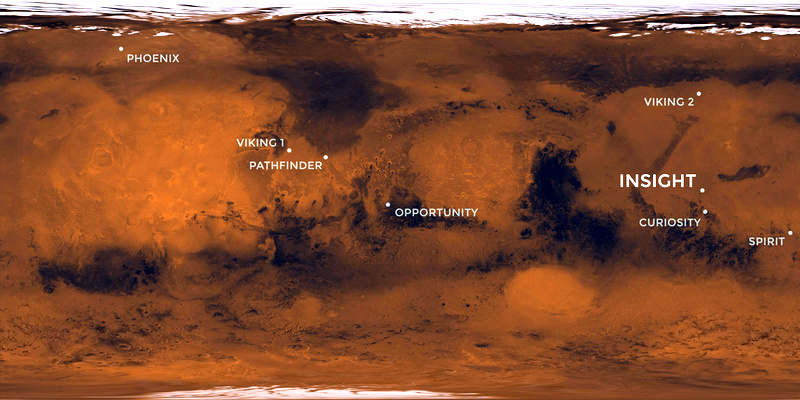
This map of Mars gives the location of the NASA missions. Insight and Curiosity are still operational. For a list of all Mars missions, click here.
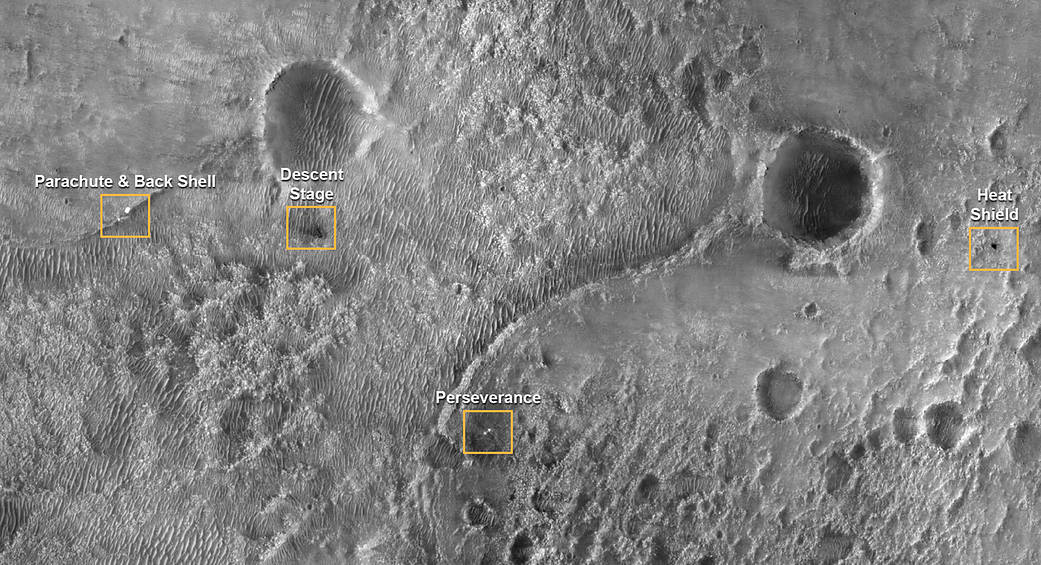
Perseverance has landed in the Jezero crater. In this picture, taken by the Mars Express orbiter, I have marked the landing location with a cross.
This amazing photo has been taken by the Mars Reconnaissance Orbiter, one day after the landing. During the EDL the heat shield, the parachute and the sky-crane (descent stage) have to be jettisoned away from the rover. When you enlarge the picture above, you can just see the two small craters.
———————————————– Perseverance’s mission
Now that Perseverance has landed successfully on the Red Planet, what is it going to do? The missions of Curiosity and Perseverance are basically the same, to determine whether Mars ever was, or is, habitable to microbial life.
When Mars was a young planet, billions of years ago, water was abundant, there were lakes and rivers, similar to young Earth. On Earth life started about 3,5 billion years ago in the form of microbes. Fossil remains of these microbial colonies are called stromatolites. Here is an example, found in Australia, ~ 3.4 billion year old.
Could primitive microbial life have started on Mars in a similar way? Curiosity landed in the Gale crater, created about 3.7 billion year ago by a gigantic meteor impact. The crater became a lake, rivers deposited sediments. Curiosity collected surface material with its robotic arm, pulverised and heated it, before using a variety of analysing tools. Many organic molecules were found, for example thiophenes. which, on Earth at least, are primarily a result of biological processes.
Mars Mission with the Perseverance will continue this research with advanced technology.
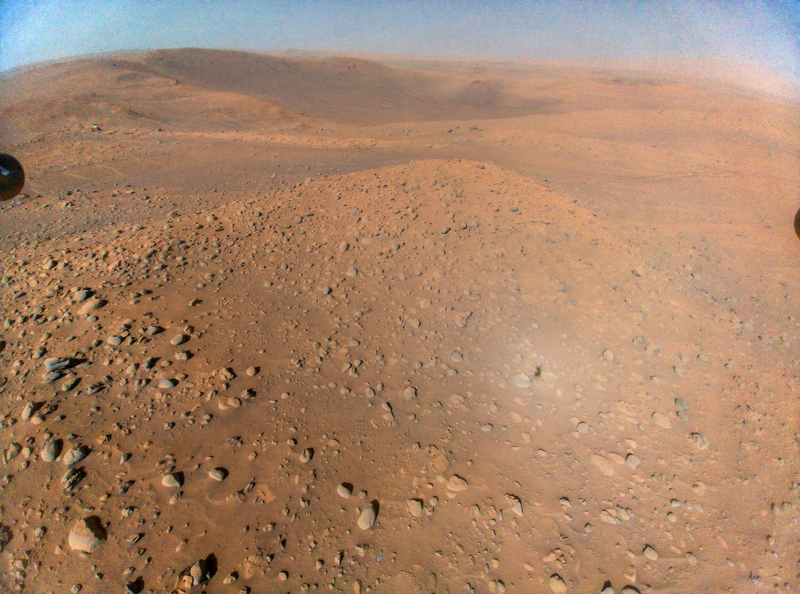
Here is an artist impression how the Jezero crater may have looked like, when it was filled with water. Notice the river, top left, flowing into the lake. That river deposited a lot of sediments in the lake and it is near these sediments that Perseverance has landed.
A detailed map of the landing region, with the various geological structures in different colors. The “valley” of the former river and the delta are clearly visible The location of the rover again marked with a cross. The scientists have already made a proposal how the rover will explore the region (yellow line). The mission will take at least one Mars year (687 Earth days). If you want more information why the Jezero crater was chosen, click here.
The robotic arm has three scientific instruments, the PIXL, SHERLOC and WATSON. PIXL stands forPlanetary Instrument for X-ray Lithochemistry . SHERLOC is an acronym for Scanning Habitable Environments with Raman & Luminescence for Organics & Chemicals and WATSON represents a Wide Angle Topographic Sensor for Operations and eNgineering . Engineering sense of humor.
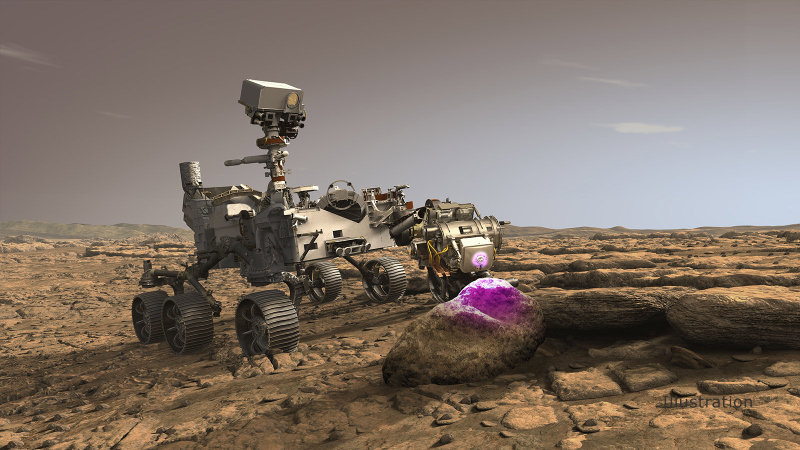
PIXL is the main instrument. It points a very narrow X-ray beam at a piece of rock and detects the reflected light (fluorescence ), which is characteristic for the chemical elements in the rock. By analysing this reflected light, PIXL hopes to find biosignatures. Here is an artist impression of PIXL in action.
SHERLOC searches for organics and minerals that have been altered by watery environments and may be signs of past microbial life . Its helper Watson will take close-up images of rock grains and surface textures.
Suppose that Perseverance finds promising locations during its traveling. Wouldn’t it be wonderful if scientists on Earth could study the material at these locations in greater detail?
Well, that is exactly the most ambitious part of the Mars 2020 project, to bring back rock and regolith back to Earth. When you are a follower of my blog, you may remember that Hayabusa2 has brought back material from the asteroid Ryugu, and of course moon rocks have been brought back. But never yet material from a planet.
The robotic arm of Perseverance contains a drill, which can collect core samples. Here it is ready to start drilling.
The core sample (comparable in size with a piece of chalk) is put in a sample tube and taken over to the body of the rover where a few measurements are made. Then it is hermetically sealed to avoid any contamination, and temporally stored in a cache container. The container has space for 43 tubes. Here is an example of a sample tube.
Watch the video to follow the complicated process. Three robotics arms are used!.
How to get these sealed tubes back to Earth? NASA and ESA (the European equivalent will work together in what at first sight looks almost like science fiction. Actually it is still partly fiction at the moment! Here is the plan.
In July 2026 (!) a spacecraft will be launched, consisting of a lander and a rover. In August 2028 it will land near the Perseverance.
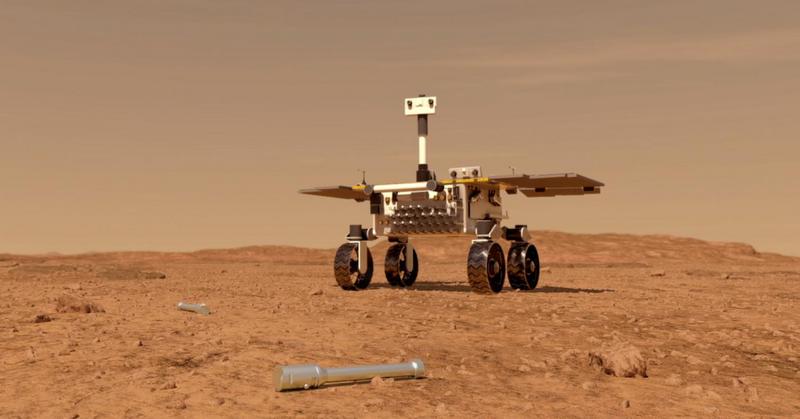
Here the spacecraft has landed on the surface of Mars, the rover still has to be deployed.
The only function of the rover is to fetch the sample tubes and bring them back to the lander. In this artist impression it is suggested that the sample tubes are scattered around, but that doesn’t make sense to me. Probably Perseverance will have created a few depots, or even kept all tubes in its own storage. The various descriptions I have found on the Internet, are not clear about this. The whole Return Mission is very much work in progress.
Here the tubes are handed over by the “fetch rover” to the lander, where they are put in the Sample Return Container.
The Sample Return Container might look like this. It will be designed so that the temperature of the samples will be less than 30 degrees Celsius.
The container will be loaded in a rocket, the Mars Ascent Vehicle, which will be launched in spring 2029.
The rocket will bring the container in a low Mars orbit and release it there..
In the meantime In October 2026 the Earth Return Orbiter has been launched, it will arrive at Mars in 2027 and lower its orbit gradually to reach the desired altitude in July 2028. There it will wait to pick up the container.
After the Earth Return Orbiter has caught the container, it will “pack” it in the Sample Return Capsule (SRC) and then go back to Earth, where it will arrive in 2031, ten years from now. It is this SRC that will will be released and finally land on Earth.
Here is a simulation of the procedure.
The primary mission of Mars2020 is to determine if Mars was habitable in the past. But there are also secondary missions. On board of the Perseverance there is one experiment, called MOXIE, that will produce oxygen from the carbon dioxide in the Martian atmosphere. Just a proof of concept experiment, important for future human missions to Mars.
Quite spectacular is that Perseverance is bringing a small helicopter, the Ingenuity. The Mars atmosphere is thin, but the helicopter should be able to fly. A bit similar to a drone, flying a few meter high, and maximum 50 m away. At the moment it is still hanging under Perseverance, planning is to test it after a few months. Here is an animation
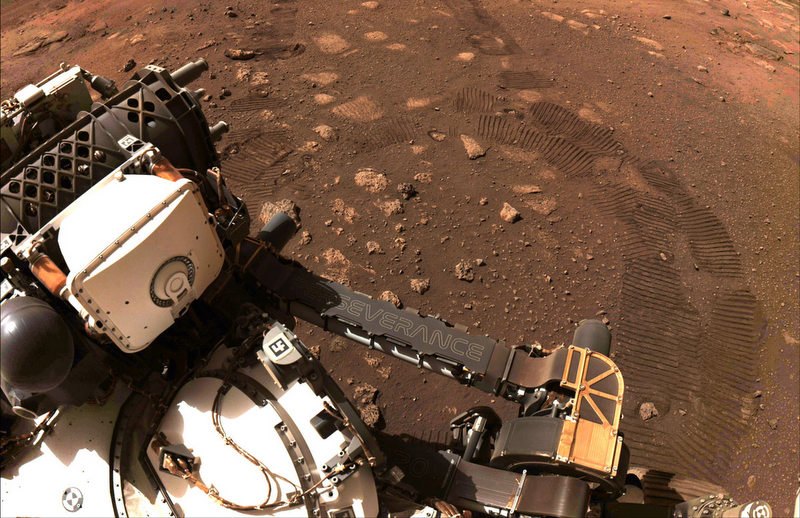
At the moment Perseverance is testing al its components. It has made its first test drive, only a few meters. Here is a picture, you can clearly see the tyre tracks.
If there is more news about the Mars2020 mission, I will update this blog or write a new one.
Let me end this blog with an animation created in 1988 (!) , describing a Sample Return Mission to Mars. Fascinating to watch.
Two years ago I have written a post, Hayabusa2 , about a Japanese spacecraft and a few months later an update, Solar System Explorers, in which I mentioned the American spacecraft Osiris-Rex.
The two spacecraft have in common that they have a similar mission: travel to an asteroid, collect some surface material from it and bring that back to Earth. That’s why I have given this post the frivolous title of Dust Grabbers.
When I wrote the two posts, both spacecraft had arrived at their respective destinations, but had not yet collected asteroid material. Now they have, so it is time for an update.
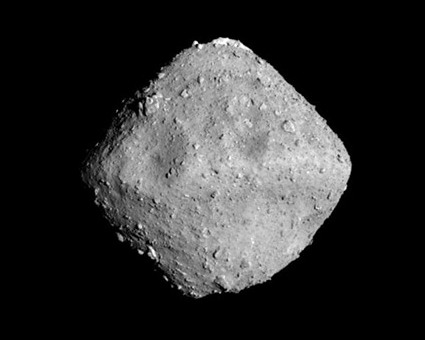
First about Hayabusa2. Here are asteroid Ryugu and the Hayabusa2 spacecraft.
After reaching Ryugu, Hayabusa2 had already successfully dropped two Minerva rovers and the Mascot lander on the surface of the asteroid (see my first report). The surface of the asteroid was much rougher than expected, here is a picture taken by one of the Minerva’s.
For the touchdown, Hayabusa2 needed a flat surface, without boulders or big rocks and it was difficult to find a suitable location. In my first report I have described the touchdown, here is a very informative animation of the process. Two screenshots, left just before the touchdown, right just after. Notice how flat the asteroid surface is in the animation.
The touchdown was originally planned for October 2018 but postponed, to give the scientists time to redesign the touchdown procedure and check if navigation could be made accurate enough to land in a very small region.
On 6 February JAXA (the Japanese equivalent of NASA) published an extensive pdf-file for the press, Asteroid explorer, Hayabusa2,reporter briefing with a detailed description of the redesigned touchdown. A location had been selected and a target marker (TM) had been dropped near the chosen location. A TM is a small (10 cm) ball of reflecting material, you can see it in the animation screenshots above, left in the foreground.
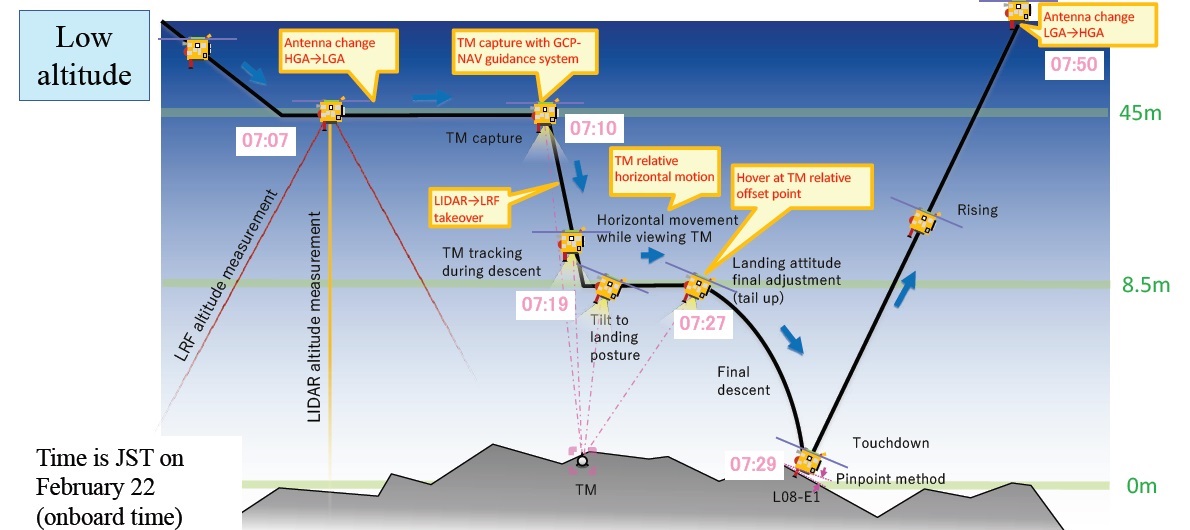
The actual touchdown finally took place on 22 February 2019. One day earlier Hayabusa2 had already descended slowly from its home position (HP) at 20 km altitude to an altitude of 45 m. Here is a time diagram of the touchdown phase. Notice that between 7:07 and 7:50 JST time, there is no communication between the spacecraft and mission control.
Also keep in mind that the touchdown is an autonomous process, because it takes 15 minutes for a signal from Earth to reach the spacecraft. All steps have been programmed by the scientists and engineers.
Try to imagine the tension in Mission Control during this “blackout” period. And the explosion of joy when the first signals from the spacecraft showed that it was still alive.
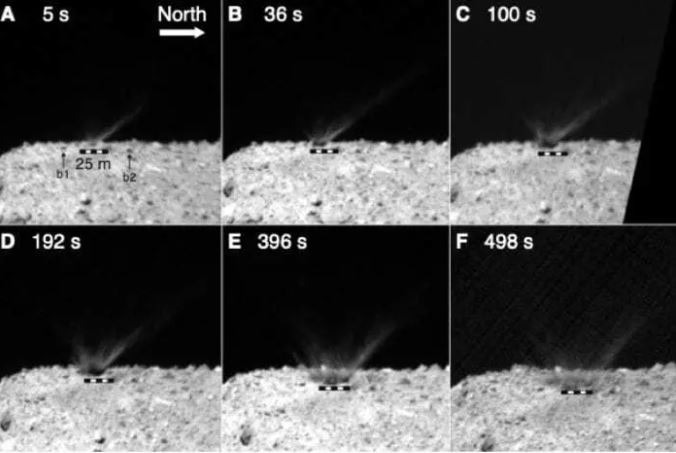
At first this is the only thing they know, that Hayabusa2 is still alive. Only later images and data were coming in. A small video camera was mounted next to the collecting horn and recorded the touchdown. Have a look at the video Here are two screenshots, before and after touchdown. I have indicated the position of the target marker, it is the white stip inside the blue circles. Also notice the surprising amount of rubble whirled up after the touchdown, mostly caused by the thrusters firing.
Originally a second touchdown was planned at a different location, but this was cancelled because of the rugged surface of Ryugu. Instead the scientists concentrated on the most ambitious part of the program. The first touchdown had collected some surface material of the asteroid. Technically called regolith . This material has the same age as the asteroid itself, but has been exposed during millions of years to solar wind and radiation.
Of course it would be very interesting to collect some asteroid material from BELOW the surface. Here is the ingenuous plan developed by the Japanese scientists:
shoot a projectile to Ryugu to create an artificial crater.
touchdown later in the crater to collect some newly exposed material.
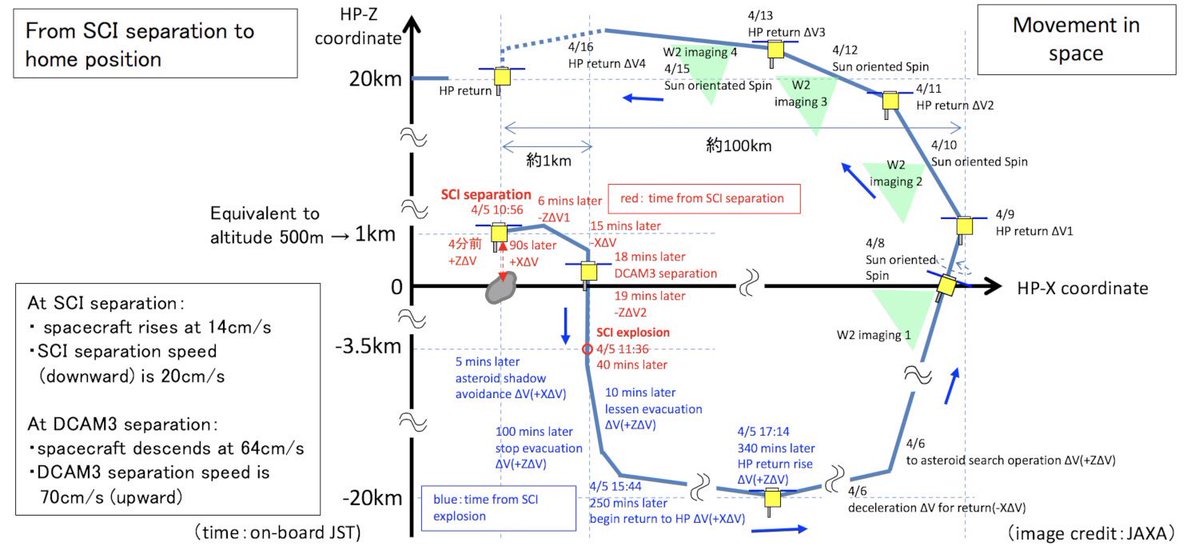
And that’s what they did! I have described the working of the so-called SCI (Small Carry-on Impactor) in my first post. Basically it is a copper projectile (2 kg) that hits the surface of Ryugu with a speed of 2 km/s, creating a crater of several meters diameter. Here is a diagram of the operation. Lots of details, I will point out a few. The operation took place on 5 April 2019.
Hayabusa2 descends from HP to an altitude of 500 m and releases the SCI with a downward speed of 20 cm/s. Here you see a time-lapse of the deployment. It takes about 40 minutes for the SCI to reach the surface and detonate. The detonation will cause a lot of debris, so Hayabusa2 must take shelter and does that by moving horizontally away and then down into the “shadow” of Ryugu.
Before disappearing below Ryugu’s horizon Hayabusa2 deployed a camera (DCAM3) to take pictures of the explosion. Here are some images. Not that spectacular for a layman, but apparently the scientists were able to draw conclusions from the vague plumes of debris that are visible.
Because of Ryugu’s weak gravitation it takes days before the debris of the explosion settles down. Notice times and distances in the diagram, Hayabusa2 moves away horizontally for about 100 km before “climbing up” again and finally reaches HP more than 10(!) days after the deployment of the SCI.
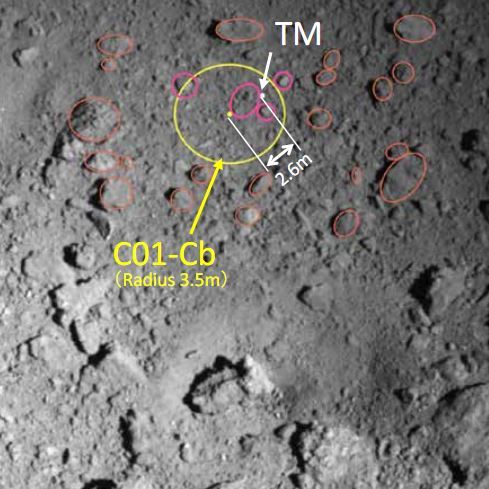
After the successful creation of an artifical crater, Hayabusa2 descended a few times above the crater to explore the new situation. Was it feasible to touchdown in or near the crater to collect material, exposed by the explosion, without jeopardizing the success of the first touchdown? On 8 July Jaxa published a very readable report discussing the pros and cons of a second touchdown: To go or not to go . It was decided to go and have a touchdown in the region C01-Cb, not really inside the crater but on the rim. Here are two images to show the touchdown area. The left image shows the artifical crater at the bottom right, the right image gives details about the size of rocks near the touchdown.
The procedure for the second touchdown was basically the same as for the first one. During one of the descends a target marker was released and on 11 July 2019 the touchdown took place. A sample was collected successfully.
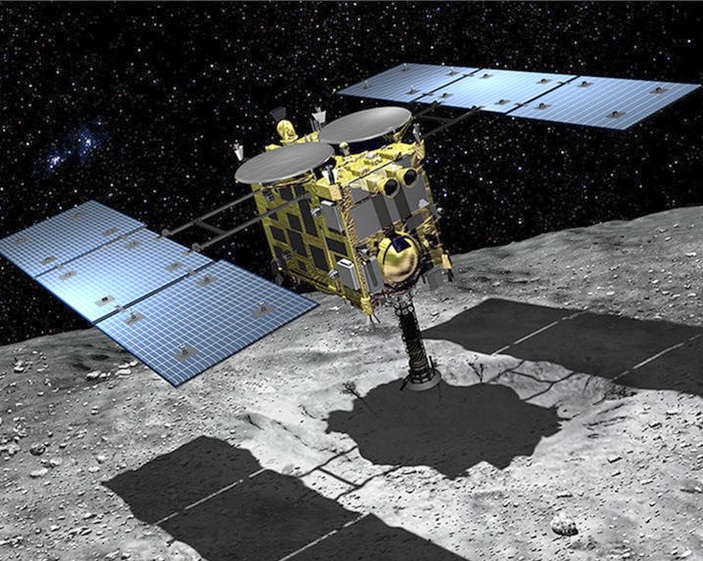
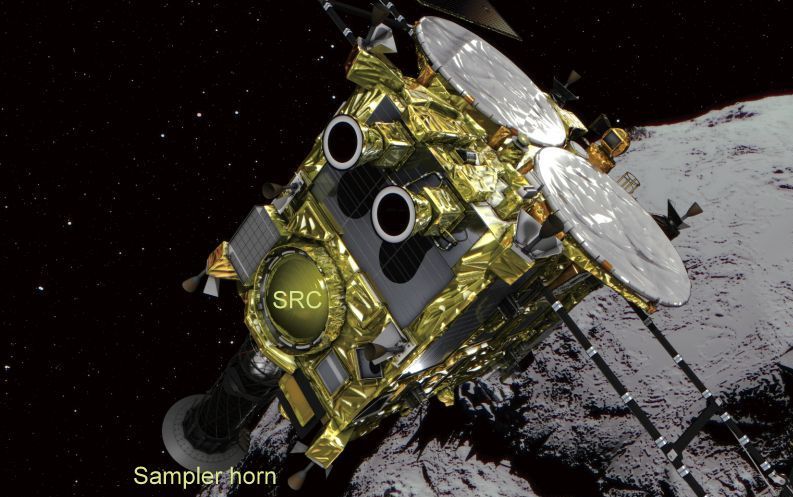
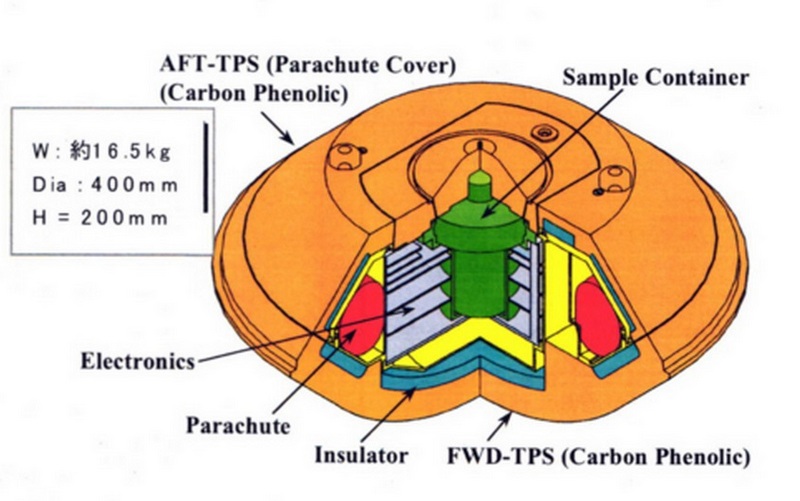
Mission accomplished, time to go home. How to deliver the two samples to Earth? Have another look at the Hayabuss2. I have indicated the Sampler Horn and the SRC, the Sample Return Capsule. In this tiny (40 cm diameter) capsule the two samples have been stored (right diagram) and it is this capsule that will be released when Hayabusa2 arrives back at Earth.
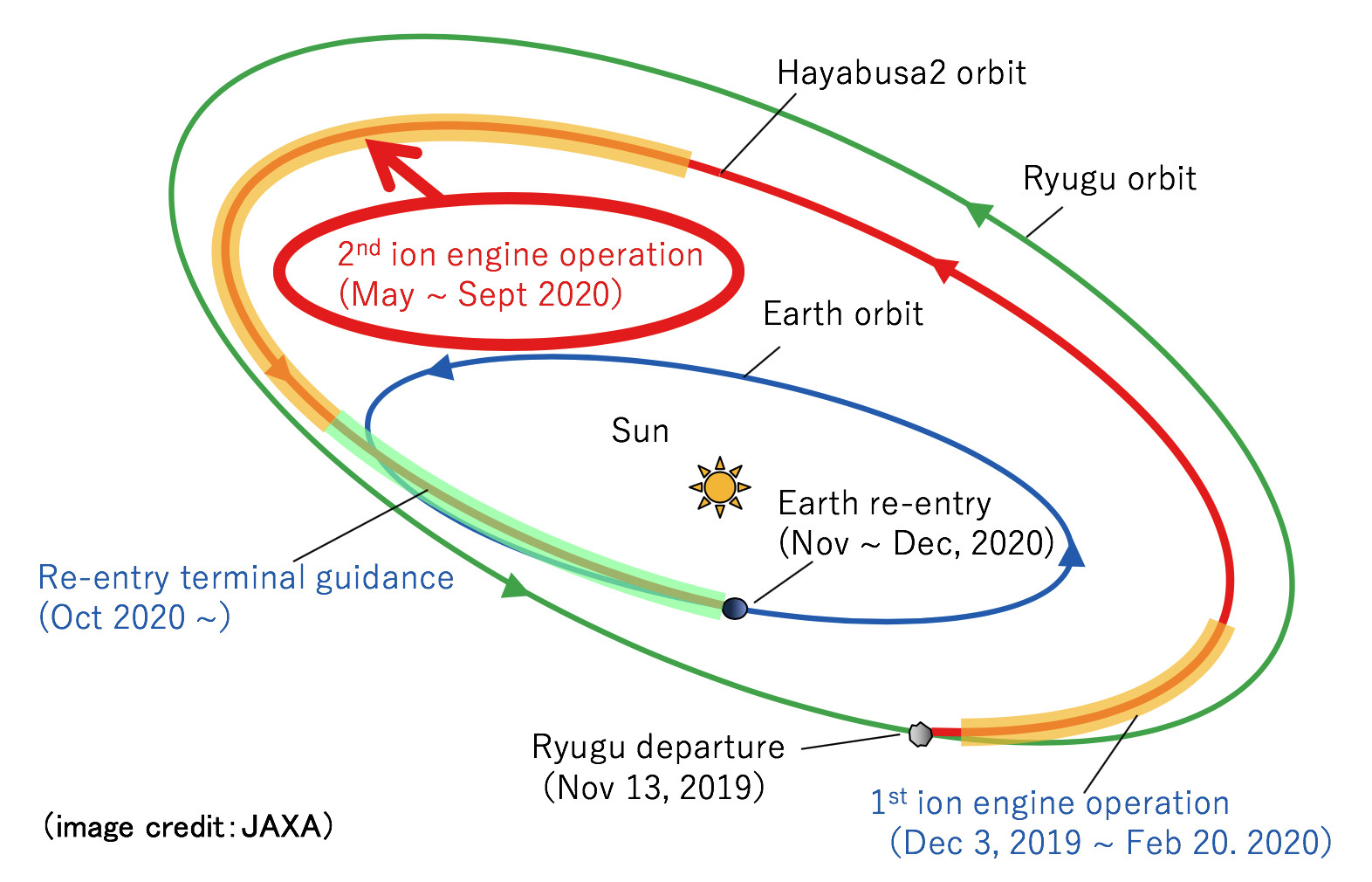
After leaving Ryugu on 13 November 2019,Hayabusa2 l will reach Earth on 6 December 2020, using its ion engines for navigation.
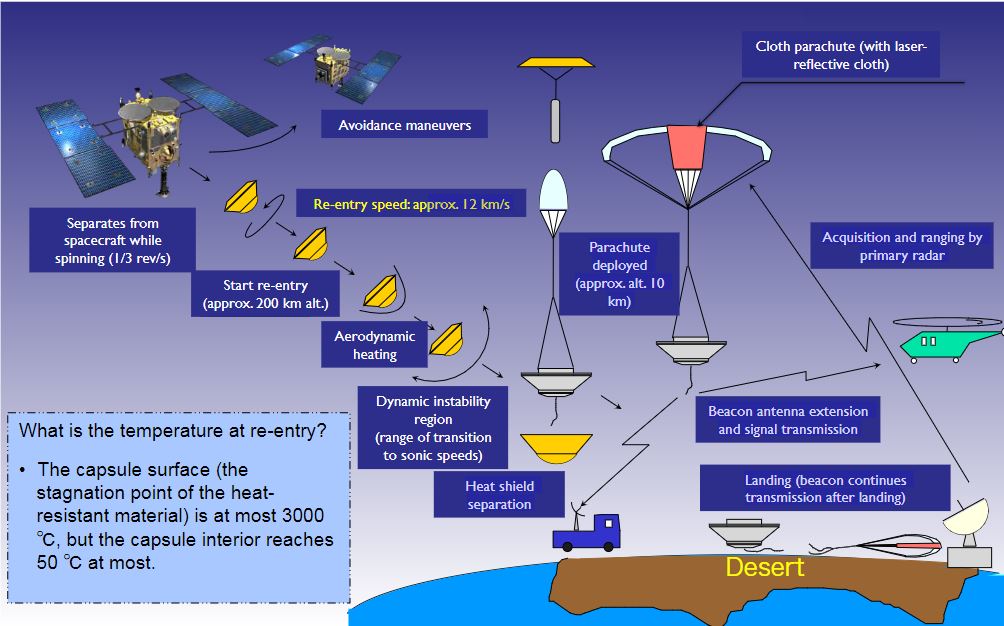
Here is a diagram of the SRC return. The capsule will enter the Earth atmosphere with a speed of 12 km/s, the heat shields will protect the sample container. At 10 km altitude a parachute will be deployed.
The planned landing location is the Woomera desert in Australia, about 450 km north-west of Adelaide. Expected landing 6 December between 2:47-2:57 JST. It will take time to find the capsule, hopefully within one day. Here is a photo of the Woomera desert.
JAXA is maintaining a monumental website about Hayabusa2, updated with the latest news: JAXA Hayabusa2 Project.
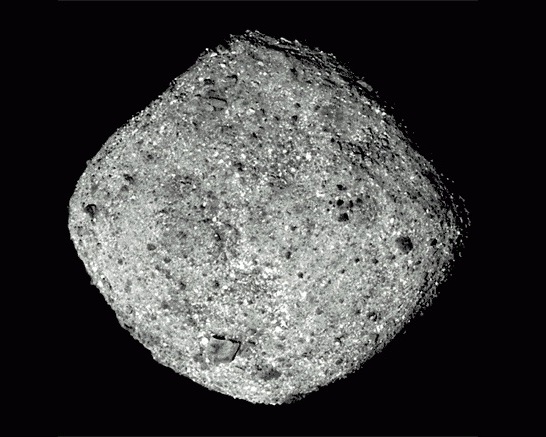
After this long report about Hayabusa2, I will be much shorter about the Osiris Rex mission. Here is asteroid Bennu, smaller (~500 meter) than Ryugu (~ 900 meter). Both asteroids are spinning fast (~ 4 and ~ 8 hours respectively) and that might partly explain their similar shape of a “spinning top”. Although the material of these asteroids is about 4.5 billion years old, both were probably formed after a catastrophic collision of parent asteroids, millions of years ago.
The Osiris Rex spacecraft has a similar design as the Hayabusa2, with a SRC csapsule for the collected asteroid material. But there is one big difference, instead of a sampler horn, the Osiris Rex has a robotic arm, which can be unfolded and grab regolith while the spacecraft is hovering above the surface.
This has its advantages. The Hayabusa2 has to touch the surface (through its horn) and therefore has to worry about rocks nearby. The robotic arm is longer (about 3 meter) and more flexible. Another advantage is the way of collecting regolith. The Hayabusa2 fires a tiny bullet inside the horn and catches the regolith that is swirling upwards. That will not be much, the team is hoping for 1 gram (!) of material. Only after the capsule is opened the mass of the samples can be measured.
The TAGSAM robotic arm of Osiris Rex works very differently. As soon as the sampler touches the surface, nitrogen gas is blown through the arm and regolith will be collected, almost like a vacuum cleaner. Here is a nice animation of the process.
The TAGSAM procedure took place on 20 October 2020 and was very successful, it is estimated that about 60 gram was collected. (For physicists: how can they know that now already? By using a clever trick, rotating the spacecraft and unfolded robotic arm before and after collection, a difference in the moment of inertia will be observed)
The spacecraft will leave Bennu next year and will return to Earth on 24 September 2023, deploying the SRC capsule to land in the Utah desert.
These has been close cooperation between JAXA and NASA. They will share a percentage of the collected material with each other.
TRIVIA:
Brian May, the lead guitarist of Queen, is also an astrophysicist and quite interested in the Hayabusa2 project. During a Queen tour in Japan in January 2020, he met a few project people: Meeting Brian May.
Because of the Covid19 pandemic, the Japanese Sample Collection Team had to arrive early in Australia (with special permission) and first go into 14 days compulsory quarantine . Here a team member is standing at the heliport where the search for the capsule will start.
In this blog I will give updates about three space exploration missions described in earlier posts and report about two new ones.
New Horizons
I will start with New Horizons . In Close Encounter with Pluto I described how this spacecraft had a successful flyby with minor planet Pluto on 14 July 2015 and in an update New Horizons that it was on its way to 2014 MU69 , an object in the Kuiper belt.
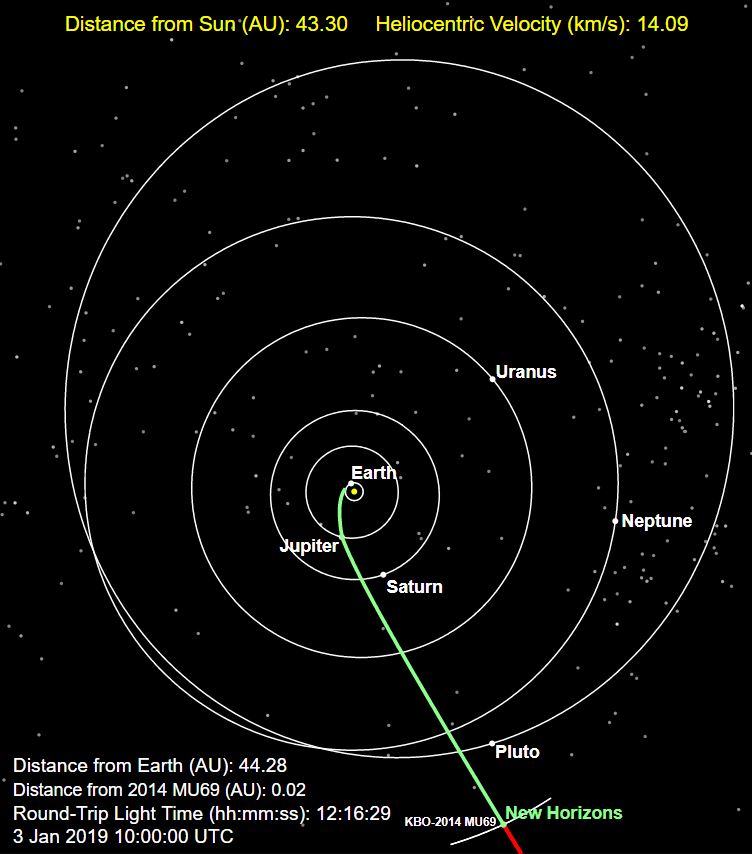
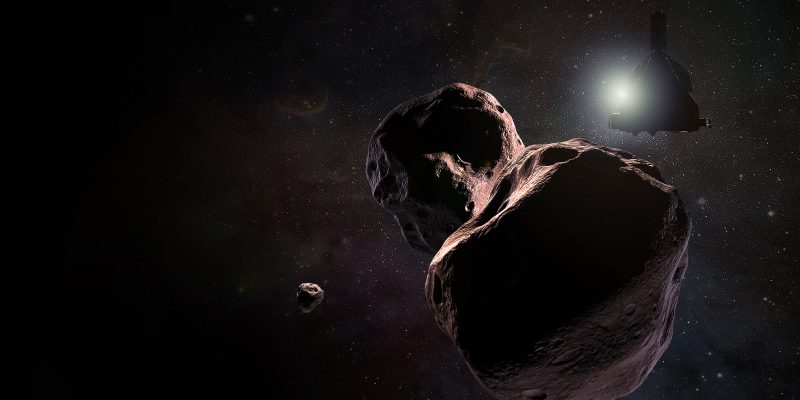
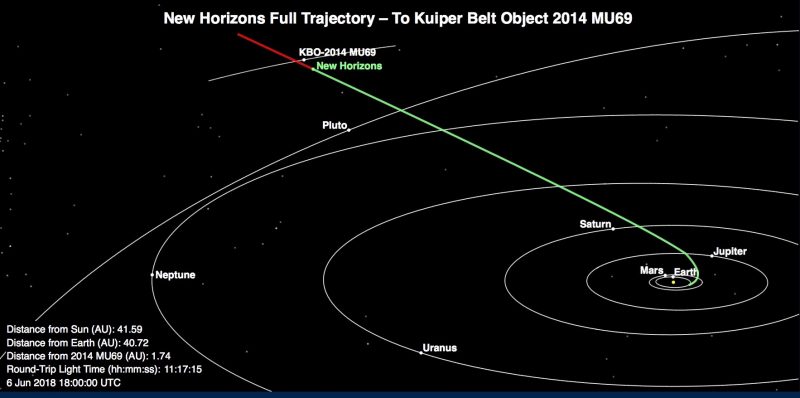
A few days ago, on 1 January 2019, it had a flyby of Ultima Thule, as 2014 MU69 has been nicknamed. The distance between Earth and Ultima Thule is at the moment 6.6 billion km, never before has there been a close encounter at such a huge distance! (Distances in the picture are expressed in Astronomical Units, 1 AU = 150 million km)
During the brief flyby, New Horizons collected about 7 gigabytes of data, which in the coming months will be sent back to Earth. Radio signals take more than 6 hours to reach Earth, the 15 Watt transmitter can send ~ 500 bits per second, it may take 20 months.
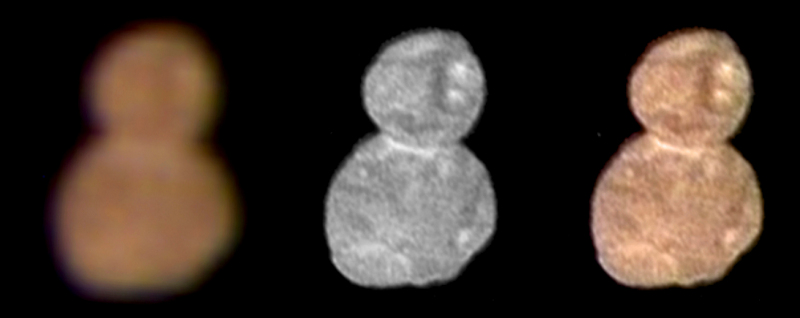
Here are the first images. Left a vague color image, middle a more detailed black and white one, right the merger of the two, a kind of reddish snowman, size about 31 km. As was already expected, Ultima Thule is a so-called contact binary, it consists of two halves, now dubbed Ultima (the larger one) and Thule.
Mars InSight
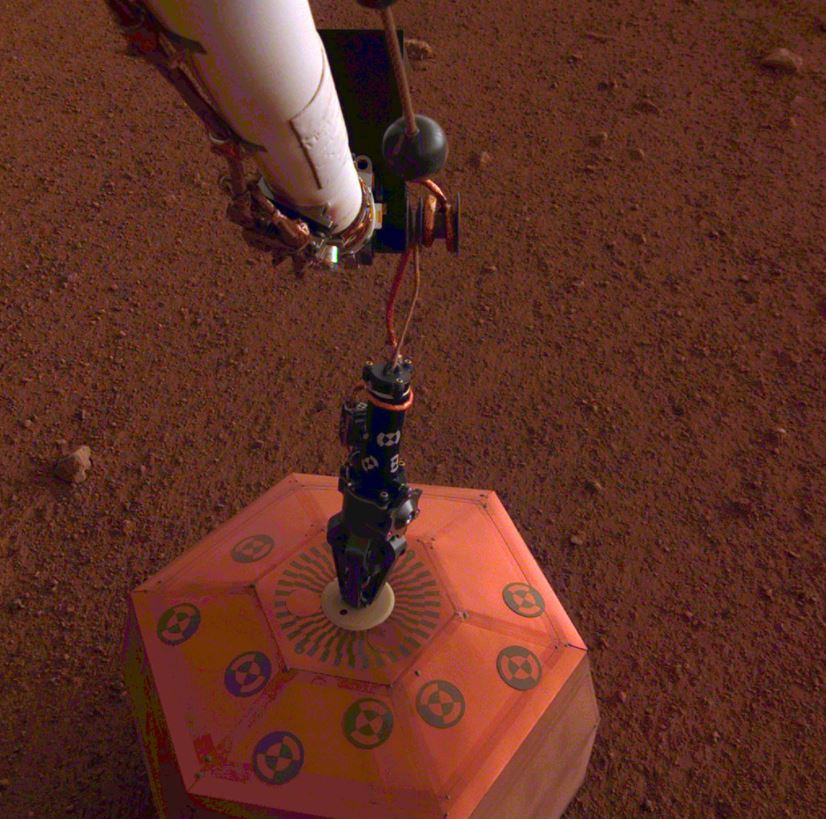
A few months ago I wrote a blog Landing on Mars, about the Mars InSight spacecraft. Mission of this spacecraft is to study the interior structure of Mars. It has now deployed the seismometer, to detect Marsquakes.
Next month InSight will start drilling into the surface of Mars.
Hayabusa2
As I reported in my blog Hayabusa2 , it came as a surprise that the surface of asteroid Ryugu was very rough and rocky. Here is a picture of Ryugu’s surface.
The first sampling touchdown, scheduled for October, was postponed until at least the end of this month. The engineers are still studying how to land the spacecraft safely.
The two tiny hopping Minerva rovers are still working correctly and have been renamed Hibou (French for Owl) and Owl. If you are curious about the reason, read this: Naming our MINERVA-II1 rovers 😉 .. Don’t think that scientists have no sense of humor 😉
Osiris Rex
When I wrote my blog about Hayabusa2, I was unaware of another mission to send a spacecraft to an asteroid, collect some material and bring it back to Earth. It is an American one, the Osiris Rex mission. Here is some information:
Launched 8 September 2016 with as destination the asteroid 101955 Bennu. Bennu is even smaller than Ryugu, about 500 m diameter. In December 2018 Osiris Rex reached Bennu and on 31 December it fired its thrusters to go into orbit. It will remain there for the next two years, studying the asteroid and it will try to acquire at least 60 gram of regolith (the surface material of Bennu) in a procedure very similar to Hayabusa’s.
Here is an artist impression of Osiris approaching Bennu, with the sampler horn extended.
And here is an image of Bennu, taken by Osiris.
Planned return date is 24 September 2023.
One aspect of the mission is worth mentioning here. OSIRIS is an acronym for Origins, Spectral Interpretation, Resource Identification, Security. Why security? Because Bennu is a potentially hazardous object, it is possible it might hit Earth in the future. Don’t worry, not in our time, but possibly between 2175 and 2199. The uncertainty is there because the orbits of these “small” asteroids are influenced by many factors, for example the disturbing influence of the other planets. But also the effect of heating and cooling by the sun light, the Yarkovsky effect and it is this effect that Osiris will study. (Forget about this if you find it too complicated… 🙂 )
Chang’e-4
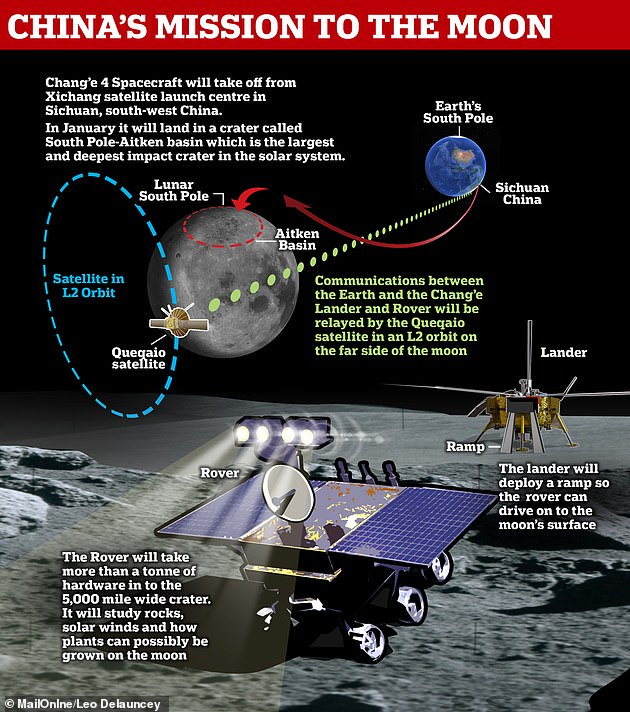
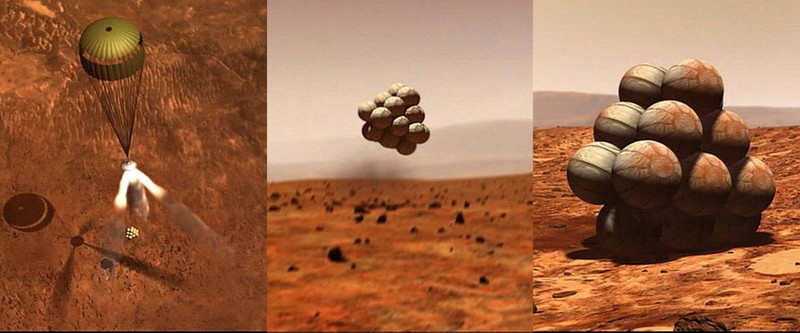
China confirmed its role as global player in space exploration on 3 January 2019, when it landed for the first time in history a spacecraft on the far (“dark”) side of the Moon. The Chang’e 4 was launched on 7 December 2018 and consists of a lander and a rover, the Yutu-2. The set-up and landing procedure were similar to the Mars Pathfinder mission, after a powered descent of the lander to the Moon surface, the rover rolls down a ramp (see my Landing on Mars post).
Here is an image of the Yutu-2, taken by Chang’e 4, just after deployment.
Compared with the missions to Mars and the asteroids, a Moon mission has the advantage that the destination is ~ 384.000 km away from Earth, communication signals take only a bit more than one second. However, for a spacecraft on the far side of the Moon, there is a problem, the Moon itself will block signals to Earth!
China has found an elegant solution for this problem: a separate satellite has been launched, the Queqiao, a few months before the Chang’e 4 launch. This communication satellite is now in a lunar orbit and will transmit the signals of the spacecraft to Earth and vice versa.
Actually the Queqiao is not orbiting the Moon, but orbiting the L2 Lagrange point, about 60.000 km above the far side of the moon. In my blog Where does the Moon come from, I have discussed a bit the concept of Lagrange points, where the gravitational force of Moon and Earth are in balance. Too complicated to explain the details, check Wikipedia for Halo Orbits.
This infographic illustrates the Chang’e mission. The Chang’e 4 has landed in the Aitken basin, near the Moon’s South Pole. This huge impact crater is 2500 km in diameter and 13 km deep !
There is one amusing detail/mistake in this infographic. It looks like the rover has four headlights! Has the creator of the infographic assumed that you needed lights, because this is the dark side of the moon?
I will update this blog when there are new developments.
Landing a spacecraft on the planet Mars is not a piece of cake!
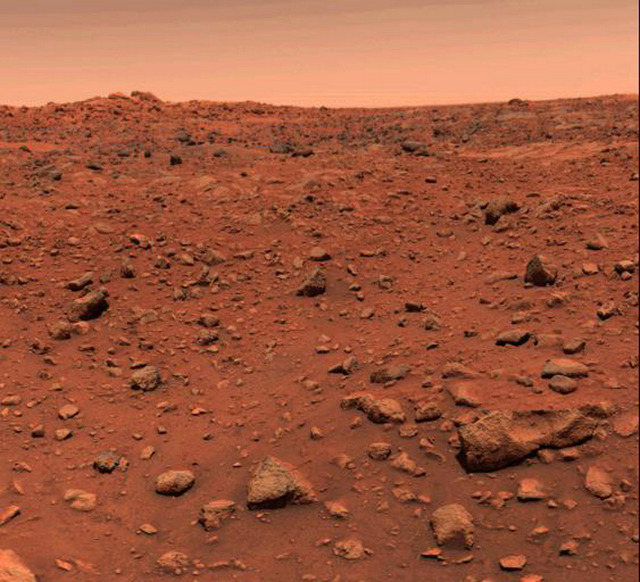
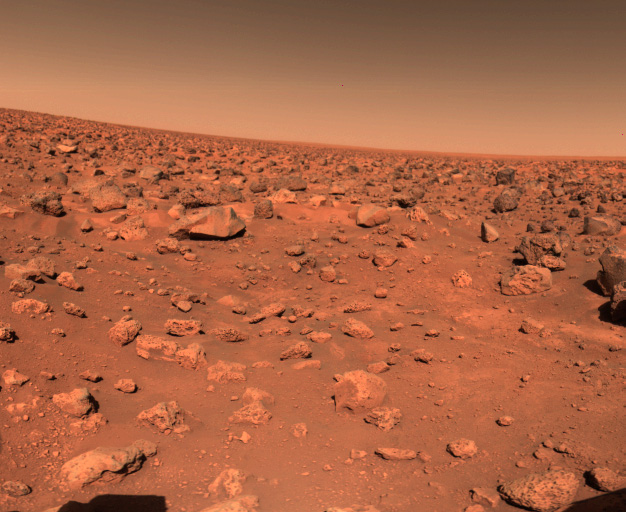
After several failed attempts the first successful landing took place in 1976, when two(!) spacecrafts, the Viking 1 and 2, landed safely on the surface of the Red Planet. And a Red Planet it was. Here are the first (color) pictures taken, left by the Viking 1, right by the Viking 2
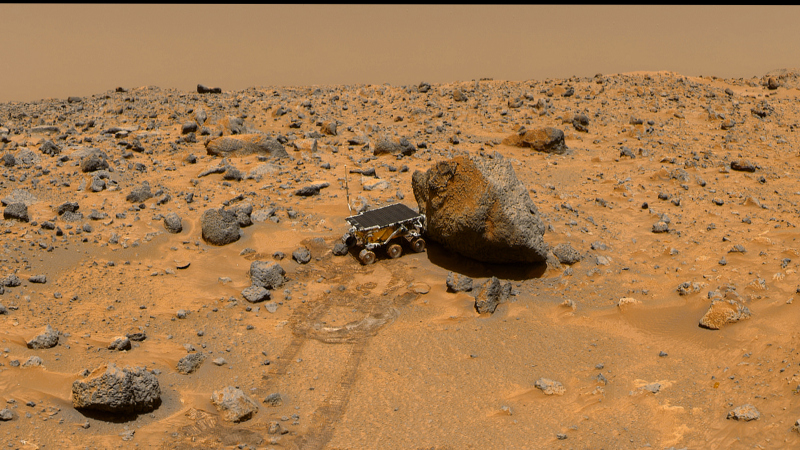
The next successful landing was more than 20 years later, the Mars Pathfinder in 1997. The lander contained a small separate vehicle, a Mars rover, that could independently explore the surface. Here you see the Sojourner, after it had just rolled down from the Pathfinder. It is a tiny vehicle of 63 x 48 x 28 cm and with a mass of about 12 kg.
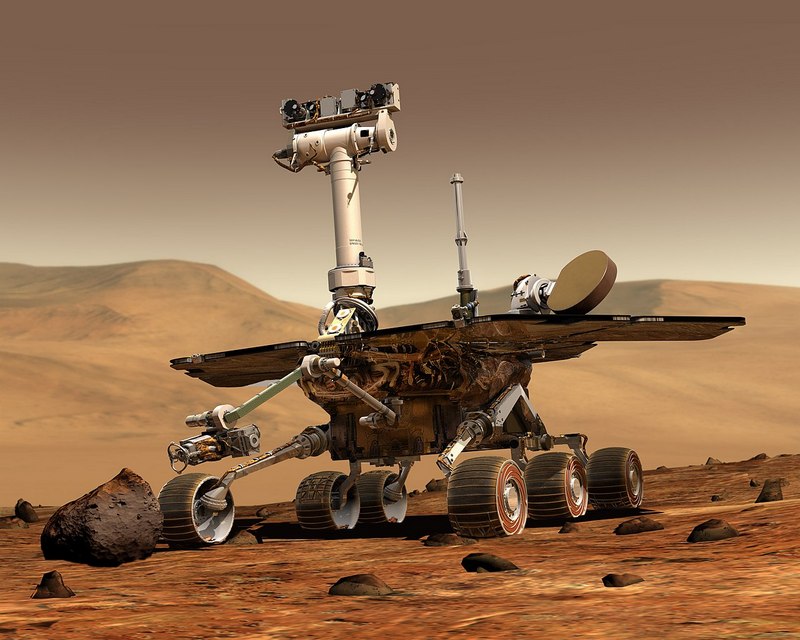
The next mission was the Mars Exploration Rover in 2004. Two separate missions actually, landing two rovers on Mars, the Spirit and the Opportunity. Both missions were very successful, the two rovers were planned to operate for 90 Sol’s (a Sol is a Martian solar day), but Spirit remained active until 2010 and Opportunity until June this year. Actually they are still trying to contact Opportunity, hoping it survived the huge dust storm that raged on Mars this year. Check this update for the latest info.
Here is an artist impression of the Opportunity rover. Compared with the Sojourner this is a big boy..:-) , 2.3 x 1.6 x 1.5 m, mass 180 kg. Until the loss of signal on Sol 5111 (June 10, 2018) it had traveled 45.16 km.
Four years later, in 2008, the Phoenix landed on Mars, for the first time a landing in the polar region. It confirmed the existence of water ice on Mars. Here is an artist impression of the Phoenix landing. Mass about 350 kg
In 2012 the Mars Science Laboratory (MSL) mission landed a rover on Mars, the Curiosity, which is still active at the moment. Dimensions 2.9 x 2.7 x 2.2 m. mass 900 kg.
This photo shows the difference in size. In the foreground the Sojourner, left the Opportunity and right the Curiosity.
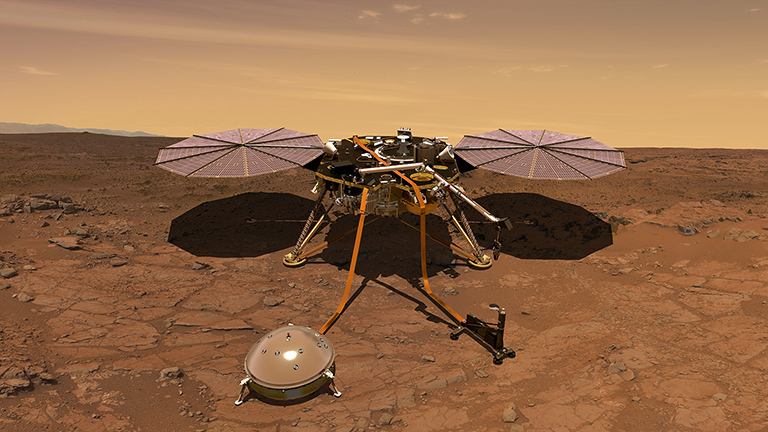
The last successful landing took place two weeks ago, 26 November 2018, when the InSight lander touched the surface of Mars. Diameter of the lander 1.5 m (without its solar panels), mass 360 kg.
Main mission is to get more information about the interior of the planet. A seismometer will record “marsquakes” and a “drill” designed to burrow as deep as 5 m, will measure the heat flow from the interior. Here is an artist impression of the lander with the solar panels deployed. Foreground left the seismometer, right the drill.
Here is a map of Mars with the location of the eight successful landings.
More than half of all missions failed, for example the Beagle 2 in 2003 and the Schiaparelli in 2016. For a full report , see the Wikipedia article Mars Landing.
Why is landing on Mars so difficult and risky?
Let us look in more detail at what is called the Entry, Descent and Landing (EDL) phase of a Mars mission. This phase starts when the spacecraft enters the atmosphere of Mars and ends about 6-7 minutes later, when it lands on the surface.
For the MSL (Curiosity) mission in 2012, NASA created a fascinating YouTube video: 7 Minutes of Terror, in which scientists and engineers explain how many things can go wrong in this phase, while they can only watch helplessly. Watch the video, it takes only 5 minutes and gives a better explanation than I can provide here…:-)
But let me try. I will concentrate on the Curiosity lander because until now it is by far the most complicated mission of all.
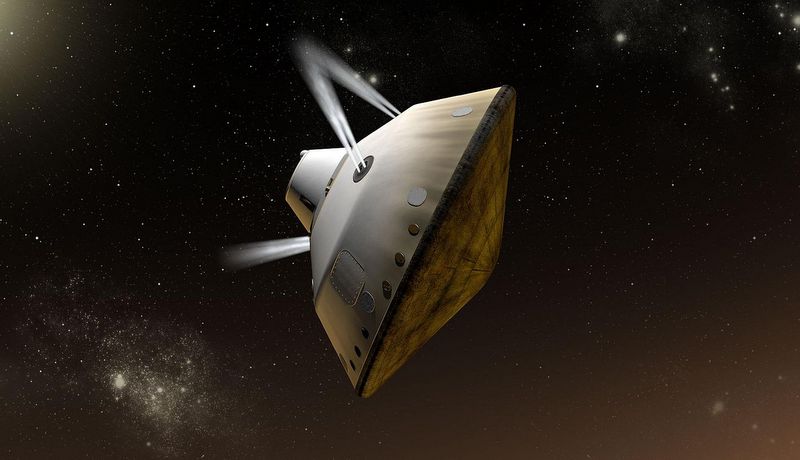
The atmosphere of Mars is very thin, but the spacecraft enters with a high velocity of about 20.000 km/h and would be destroyed if it was not protected by a heat shield. Here is an artist impression of the so-called aeroshell in which the Curiosity (and all other landers) is safely stowed away. It consists of a backshell and a heat shield.
Here is the aeroshell in the assembly hall. The diameter is 4.5 m. You can see the Curiosity inside the backshell. On top of the backshell is the cruise stage which controls the spacecraft during the cruise from Earth to Mars.
An exploded view of the aeroshell. From left to right the cruise stage, the backshell, the descent stage, the Curiosity rover and the heat shield.
All Mars landing missions have three parts, two of which are basically the same: 1. slowing down by atmospheric friction and 2. further speed reduction by a parachute. You need one more step, because the Martian atmosphere is so thin that a parachute can not reduce the speed to (almost) zero at ground level. One way or another, you need (retro) rocket power for the last part
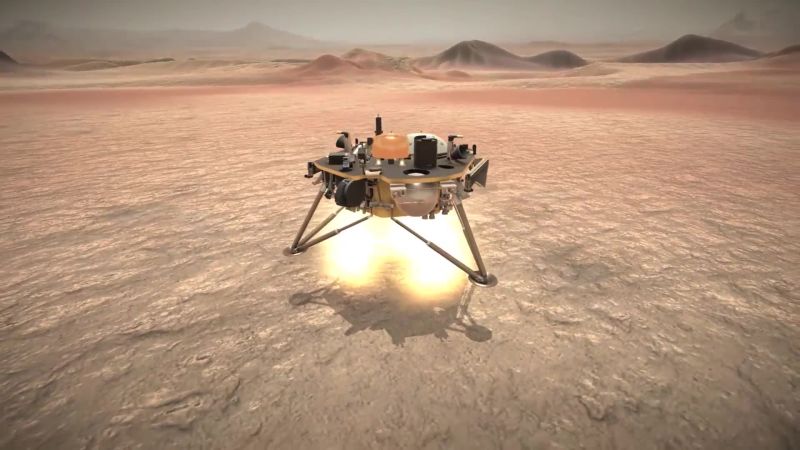
When the spacecraft is a lander, the “easiest” way is to provide it with retro-rockets. After the lander detaches from the backshell, it will unfold its legs and use its rockets to land. See the picture above of the Phoenix. The InSight used the same solution. Here is a picture of the InSight landing.
Rovers have to move around, so it doesn’t make sense to burden them with the extra weight of these rockets. That’s why for the Pathfinder, Spirit and Opportunity another solution was developed. Put the retro-rockets in the backshell, lower the rover on a tether connected to the backshell, protect it with airbags(!), use the rockets until almost zero speed, then drop the rover. Here is a collage of what it would look like for a Martian observer. Left, the airbags are already inflated, the rover is still hanging under the backshell, which is retro-firing. Middle, the rover has touched the surface but is still bouncing many times, before it comes to rest (right). Then the airbags will deflate and the rover is ready for action. Here is an animation of the landing of the Spirit rover.
The Curiosity is too heavy and voluminous for this airbag technique, so a spectacular new (and expensive) solution was developed. A sky crane!
Here is a schematic view of the EDL process for the Curiosity. The first phase, atmospheric braking, looks normal, but there is a difference. Before the aeroshell enters the atmosphere at an altitude of 125 km, with a velocity of 20.000 km/h, some mass is ejected one sided (“Cruise Balance Device Separation”). The resulting “unbalance” has as effect that the aeroshell will not move ballistically (like a projectile) but can be “steered” a bit through the atmosphere. The Martian atmosphere has turbulence, storms, pressure differences etc, affecting the trajectory of the aeroshell, resulting in a considerable uncertainty in the final landing location. The “hypersonic aero-maneuvering” reduces this uncertainty, important for Curiosity which had to land close to the rim of the Gale crater.
At an altitude of 10 km from the ground, when the velocity is about 1500 km/h, a huge parachute (diameter 17 m!) is deployed, slowing down the aeroshell further. The heat shield is ejected 20 seconds later. From that moment, using radar, the exact altitude can be measured, and the precise time when the descent stage & rover have to detach from the backshell. The descent stage starts firing the retro-rockets, first to move horizontally away from the backshell and the parachute. Meanwhile the rover is lowered 7.5 m on cables, it deploys its wheels, while still connected through an “umbilical cord with the descent stage. Here is an artist impression.
As soon as the rover touches the ground, the connecting cables are cut and the descent stage will fly up and away, to crash a few hundred meters from the rover
Curiosity has landed! All this (and numerous details I have skipped) must happen in less than 7 minutes. Seven minutes of terror, because everything is automatic. If something goes wrong, nobody can do anything. Besides, the radio signals back to Earth take about 14 minutes, so, when Mission Control gets the message that the spacecraft has entered the atmosphere, it has actually already landed (or crashed….) Here is an animation of the Curiosity landing. Spectacular.
Compared with the Curiosity mission, the landing of InSight was a lot simpler, basically the same as the Phoenix in 2008. The mission of InSight is to study the interior of Mars, the precise landing location is less important, as long as the surface is flat. Therefore no “guided entry” through the atmosphere was needed. The InSight is also much lighter (360 kg) than the Curiosity (900 kg), so it was decided to provide the lander itself with rockets.
Of course it is still a major technological achievement! NASA published a very good explanation of InSight’s EDL phase: InSight landing on Mars .
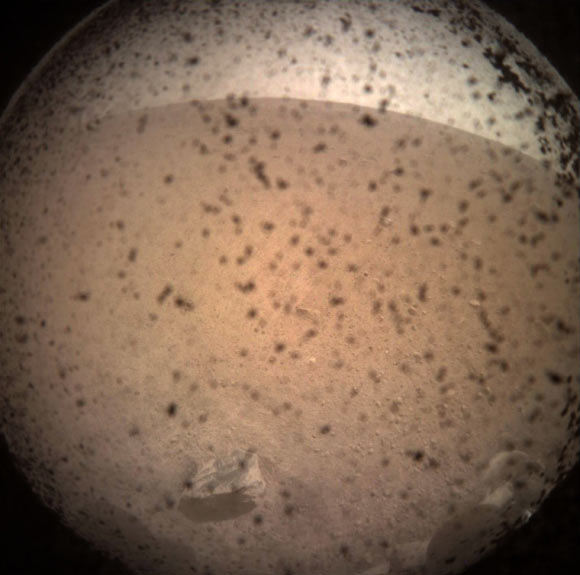
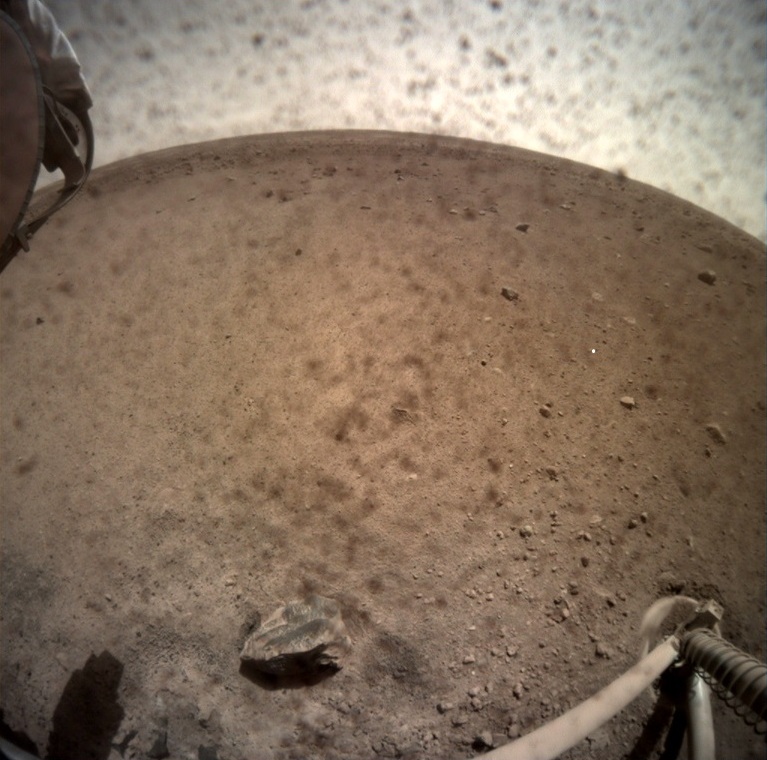
Here are three pictures taken by the InSight. The lander has two cameras, the Instrument Context Camera is a fisheye camera, mounted underneath the lander deck. In the first picture (left), taken a few minutes after landing, the lens is still protected by a transparent cover, because of the dust whirled up by the rockets. In the right picture the cover has been removed. and as you can see, still a lot of dust has managed to crawl under the cover and stick to the lens. Unfortunate, although the images will still be usable.
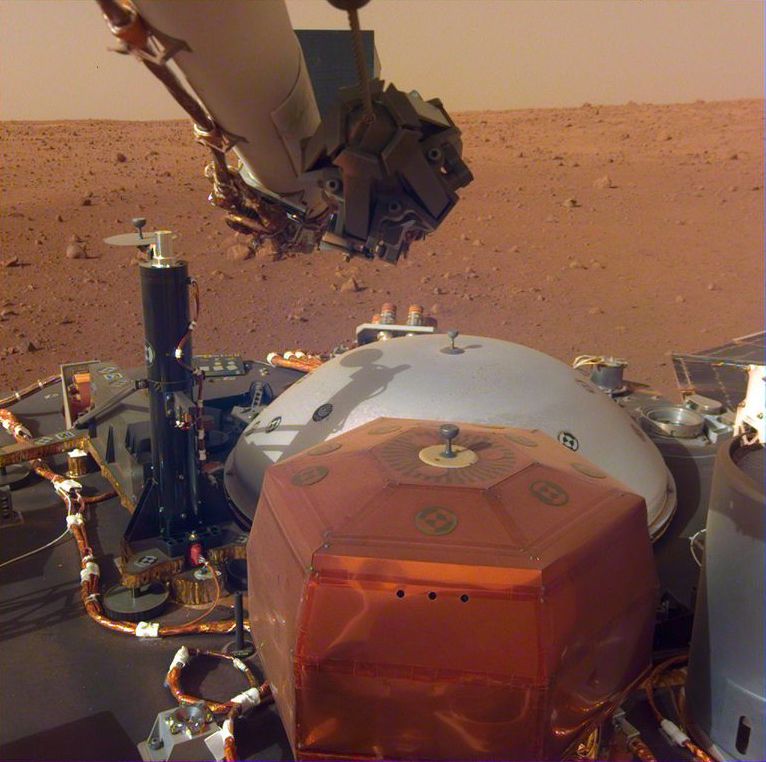
The second camera is mounted on a robotic arm, Here is a superb picture taken by this camera. The scientist are very happy with the sandy, rock-free location. The reddish box is the seismometer which later will be deployed after the best location has been determined.
The latest news about the InSight mission can be found here
In 2014 I have published several posts about Rosetta, the spacecraft that has explored the comet 67P. Click here for my reports. I am very interested in these Close Encounters between spacecraft and celestial bodies. Here is a new one, the Japanese Hayabusa mission. Actually there are two Hayabusa spacecrafts, the first one was launched in 2003, the second one in 2014.
Their mission was basically the same: Fly to an asteroid, land on it, collect some asteroid material, then fly back to Earth to deliver the collected material. An ambitious project!
Hayabusa was the first spacecraft ever that has landed on an asteroid and returned to earth with some asteroid material. Not as much as was hoped for, because the mission encountered quite a few technical problems. Therefore a second, improved Hayabusa2 spacecraft, was designed and launched on 3 December 2014.
Here is an artist impression of the Hayabusa2. The boxlike spacecraft has dimensions of 1 x 1.6 x 1.25 m and a mass of 609 kg
Destination? A tiny asteroid, 1999 JU3.. In an earlier post I have explained the complicated naming of the minor planets. The J stands for the first half of May, U stands for 20 and the subscript 3 means 3×25. So this asteroid was the 95th minor planet, discovered in the first half of May 1999. This provisional name is replaced by a number and sometimes a name, in this case 162173 Ryugu. It is the 162173th minor planet and the name has been suggested by JAXA, the Japanese counterpart of NASA.
Here is the route followed by Hayabusa2 to Ryugu.The Earth orbit in blue, Ryugu in green and the Hayabusa2 in purple.
It reached the asteroid, 3.5 year after the launch, on 27 June 2018, . One day earlier it took this picture of Ryugu, from a distance of about 40 km
Properties of Ryugu: not really spherical, diamond-shaped, a diameter of ~ 900 m and a rotation period of 7.6 hours. The gravitation at its surface is about 80.000 times smaller than on Earth!
Until December 2019 Hayabusa2 will stay near Ryugu, at a distance of 20 km (HP, home position), where the gravitational attraction of the asteroid is almost nothing. From there it will investigate the properties of the asteroid and several times it will descend for a short time to the asteroid.
On 20 September the spacecraft started a slow, controlled descent and one day later, 55 m above the surface of Ryugu, it dropped two Minerva rovers. While they were falling down to the surface, Hayabusa2 ascended to HP. Both rovers are working correctly, a huge relief for the scientist, They are really tiny, diameter 18cm, height 7 cm, mass 1.1 kg Here is an artist impression.
Both rovers have multiple cameras and temperature sensors on board They can move around by “hopping” and do this autonomously! Wheels like for example the Mars rover has, would not work in this low gravity world. One hop can take 15 minutes and move the rover horizontally ~15 m.
This is a picture of the Ryugu surface, taken by one of the rovers.The scientists are surprised that the surface is so rough.
On 3 October, the spacecraft descended again to Ryugu, to drop the MASCOT lander, developed by the German and French space agencies. A bit larger and heavier, size of a shoebox, mass ~10 kg. Contains cameras and various scientific instruments. No solar cells like the two rovers, but battery operated, able to provide power during 16 hours. Also able to hop, like the rovers.
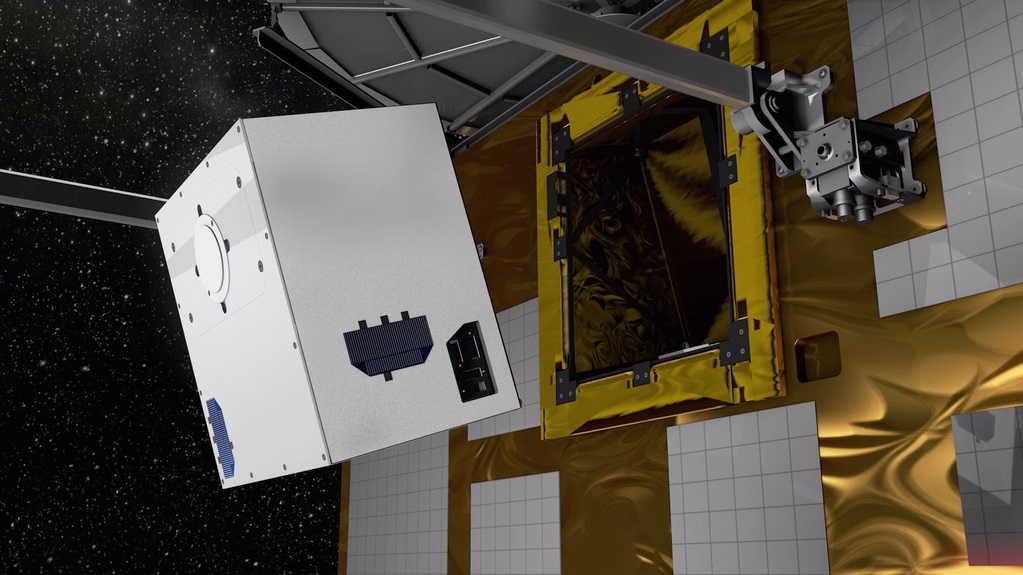
This is an artist impression of the MASCOT, leaving its container in Hayabusa2.
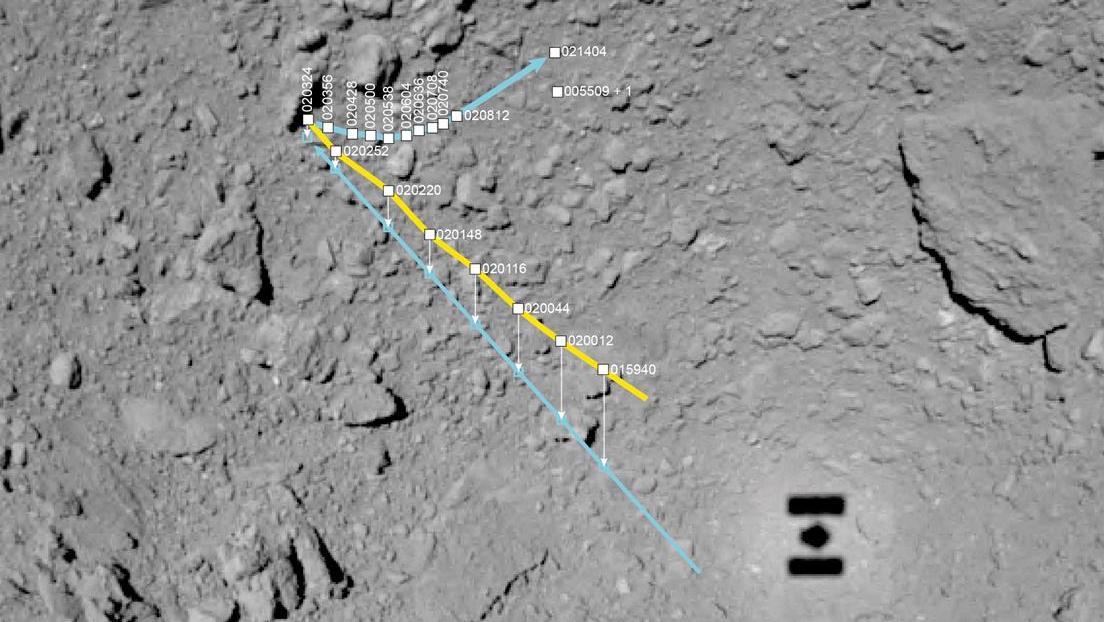
During the descent, Hayabusa2 was able to follow the lander. The yellow line is the actual path, the blue line is the projection on Ryugu’s surface. The times are given as “hhmmss”. After it hits the surface, it bounced several times. During the last part (straight blue line),no pictures were taken. The location 02:14:04 is the final landing place. The separate location 00:55:09 +1 is taken one day later and proves that MASCOT has managed to hop. The shadow is from Hayabusa2
Here are two images taken by MASCOT itself. Left while descending to the surface and yes, that is its own shadow top right. Right after landing, again showing a very rough surface.
After the successful landing, MASCOT started to use its scientific instruments (spectrometer, magnetometer and radiometer) and sent the data back to Hayabusa2 within the limited timespan of 16 hours. Actually the batteries lasted one hour more, a bonus. It hopped two times.
Until now the mission has been very successful: two rovers and one lander have touched an asteroid for the first time in history!
What will be next? The main mission is to collect material from Ryugu and bring it back to Earth. How to do that? Here is a schematic view of Hayabusa2. Notice the .Sampler Horn at the bottom
This is the procedure: the Hayabusa2 will descend very slowly to the asteroid until the horn touches the surface. Then a small (5g) bullet will be fired inside the horn, hit the surface at high speed and surface particles will fly up and be collected at the top of the horn. Hopefully at least 0.1 gram, maximum 10 gram. This will be done at two different locations.
The third and last one is quite spectacular, an attempt to collect material below the surface. Here is another view of the bottom of the spacecraft. Next to the horn you see the Small Carry-on Impactor.
It is an explosive device, meant to create a crater in Ryugu, so that Hayabusa2 can collect the debris. Here is how it works . The explosive will deform the copper shield (2.5 kg) into a projectile, that will hit the surface at a speed of 2 km/s, creating a crater with a diameter of several meters
By the way, this is where the idea may have come from…:-)
The explosion must of course not damage Hayabusa2 itself! The scientists have found this spectacular solution:
Hayabusa2 approaches the surface of Ryugu.
It releases the bomb and also a camera.
Then it moves up and sideward to hide itself behind the asteroid!
The bomb explodes and creates a crater.
The camera takes images and sends them to Hayabusa2.
Hayabusa2 appears again and descends above the crater.
The horn will collect debris of the explosion
Here is an artist impression, where Hayabusa2 is descending above the newly formed crater.
The first touchdown of the spacecraft itself was planned for end October, but it has been postponed until January 2019.
Why?
Because the surface of Ryugu is much rougher than expected!
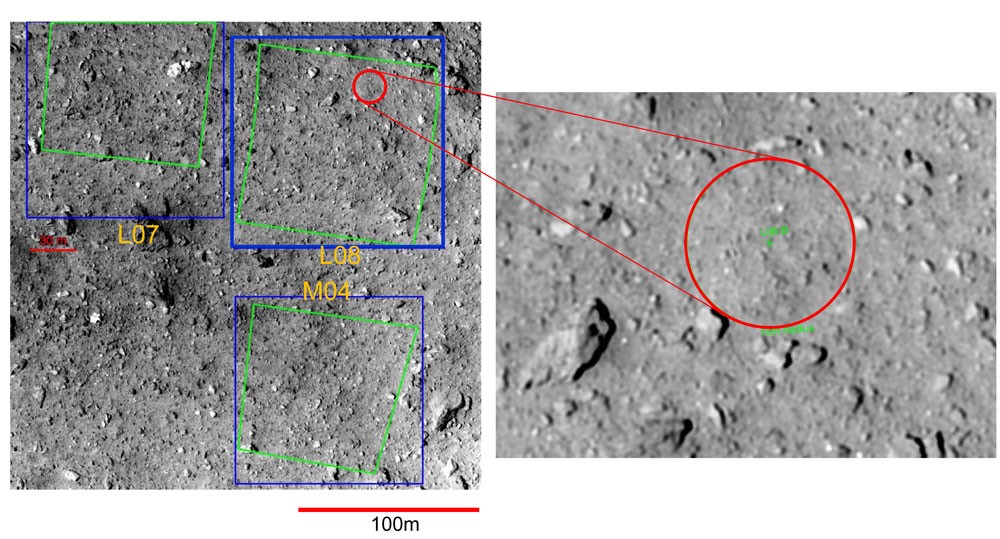
The horn of Hayabusa2 extends about 1 m, therefore the touchdown area should not have rocks higher than 50 cm. The touchdown area must also have a diameter of at least 100 m because of navigational accuracy.
Such a location could not be found on Ryugu!. Below is the one finally chosen (red circle) free of rocks, but ONLY 20 m in diameter!
There is also some good news. The earlier launching of the rovers and the MASCOT showed that navigation (with laser range finders) could be done more accurately (within 10 m), at least until the altitude of 50 m above the surface.
In the next weeks, two rehearsals will be performed, going lower, to find out whether tis accuracy can be maintained until touchdown.
The first real touchdown is now planned for January next year. There is enough time because Hayabusa2 will stay at Ryugu until December 2019.
All this is happening at about 300 million km away from Earth. Amazing. Keep in mind that communication between Earth and the spacecraft takes about 15 minutes, one way!
The German Space Agency has published a very instructive YouTube video, illustrating what I have tried to explain in this blog. Not only about the MASCOT lander as the title suggests. Worth viewing more than one time!
If more news becomes available I will write an update
The first time I wrote about the New Horizons spacecraft was in a February 2015 post: Close Encounters. Launched in 2006, its primary destination was Pluto. During the long voyage it had gone into hibernation (to save energy) and now it had woken up successfully to prepare for the flyby of Pluto in July.
To give you an impression of the size of the spacecraft, this picture is taken in 2005 during preparation for the launch.
Note the black “tube” to the left, it is the RTG, the power source for the spacecraft.
Solar panels can not be used because of the large distance to the Sun, instead radioactive plutonium is used.
The heat of the radioactive decay is converted into electricity by thermocouples.
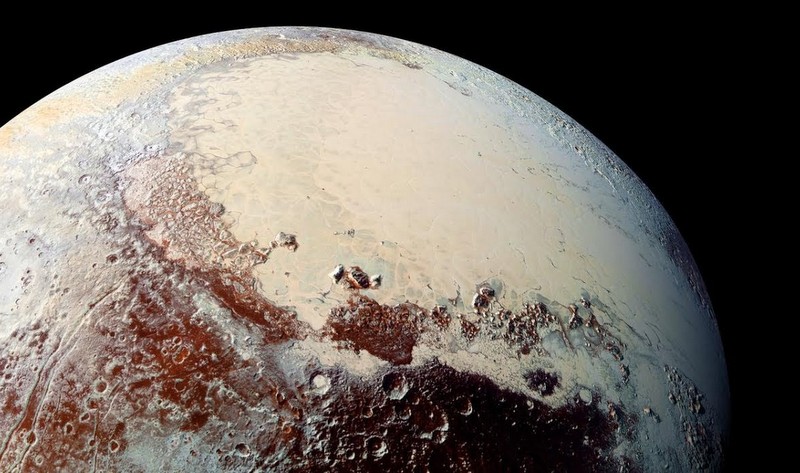
My second post was titled Close encounter with Pluto and published July 2015, a few days after the successful flyby. Here is a picture of Pluto, in high resolution, taken by New Horizons. Although the flyby took only minutes, the transmission of all photos taken, took more than a year, because of the slow bandwidth. Analysis is still going on.
In that post I wrote that New Horizons would try to visit another member of the Kuiper Belt before it left the Solar System. Soon after the Pluto flyby, in August 2015, it was decided that (486958) 2014 MU69 would be the next destination.
What a name ..:-). Let me explain. The Kuiper Belt is located outside Neptune and contains trillions of objects, remnants of the early solar system. Pluto, once seen as the ninth planet, is now seen as a Kuiper Belt object. The Minor Planet Center keeps track of all the observed Kuiper Belt objects and the present count is 779736 !
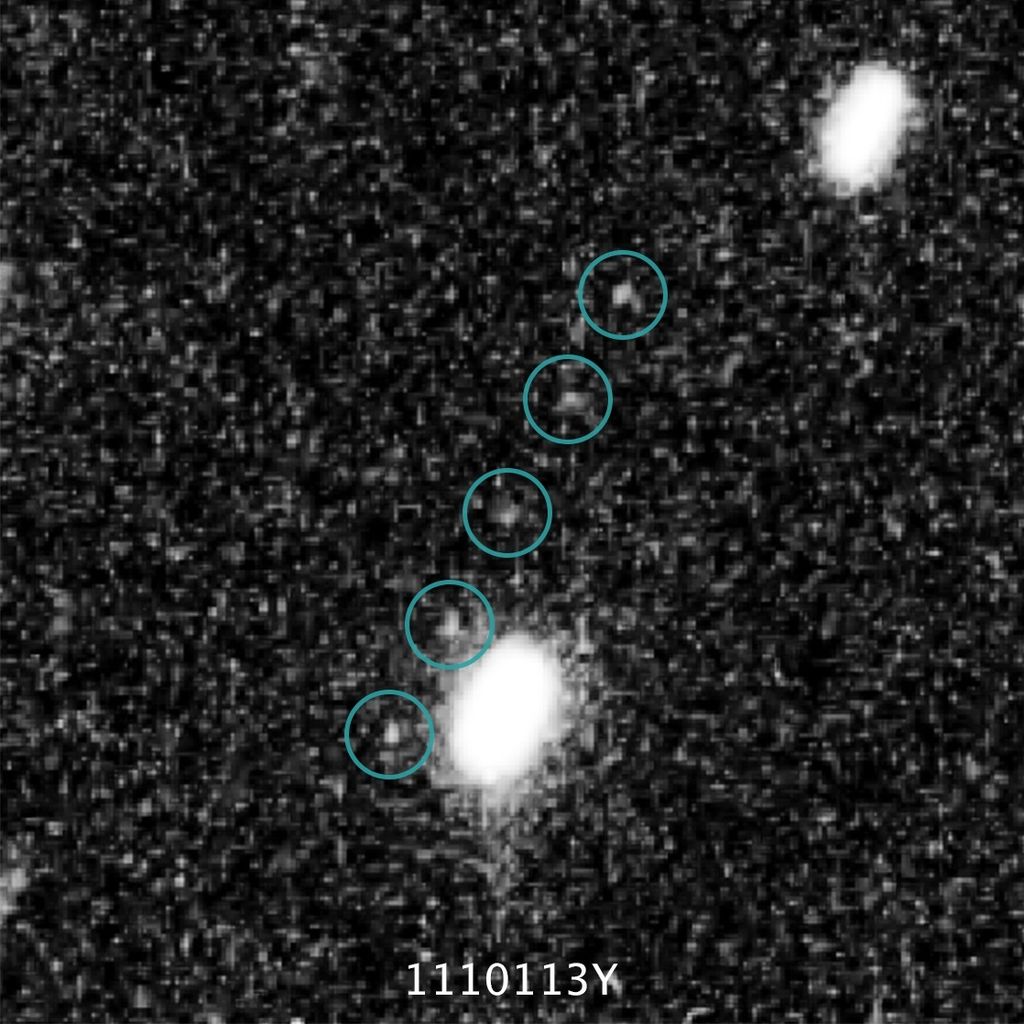
The target of New Horizons is minor planet no 486958, discovered by the Hubble Space Telescope in 2014.
In this image (taken by the Hubble telescope) you see the object (surrounded by a green circle) at 10 minute intervals
The code MU69 tells in a complicated way that the object was the 1745th Kuiper Belt object, discovered in the second half of June! Curious about the code? Have a look at the Wikipedia item about Minor Planet naming.
After a public voting campaign, NASA announced a few months ago that 2014 MU69 would get the nickname Ultima Thule. In classical and medieval literature Ultima Thule got the meaning of any distant place located beyond the “borders of the known world”
First estimate of Ultima Thule’s size, based on distance and brightness, was about 30 km. After it was chosen as the next target of New Horizons, of course many more observations have been made. How to get more information about an object of ~ 30 km, at a distance of more than 6 billion km?
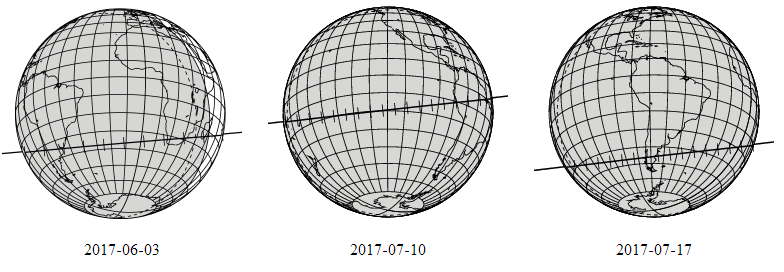
Well, it can happen that Ultima Thule passes in front of a background star! In that case it will block for a short while the light of this star. This is called an occultation. Last year Ultima Thule occulted three different stars in June and July. Such an occultation can only be seen from specific locations on Earth (similar to a solar eclipse). Here are the three predicted occultation paths.
On 3 June 2017, the NASA scientists tried to observe the “shadow” of Ultima Thule from Argentina and South Africa, but detected nothing. It turned out later that the predicted occultation path was not accurate enough, so the telescopes had been placed in the wrong location..
The second occultation took place over the ocean, therefore the airborne telescope SOFIA was used, flying along the predicted occultation path.
Main purpose was to check for hazardous material around Ultima Thule, which could endanger the fly-bye of New Horizons.
First they thought that they had missed the shadow, but later analysis showed that there had been a short dip from the central shadow
The third attempt was very successful. 25 telescopes were placed along the occultation path in South Argentina and five of them observed the dip.
Here is an example. It is an animated gif, time between the frames is 0.2 seconds.
Watch the star in the centre and notice how it “disappears” for a short while!
Careful analysis of the “dip” gives a lot more information. Ultima Thule might be actually a contact binary, with a very elongated shape.
More information about this amazing scientific exploration can be found in this NY Times article.
Here is an artist impression of Ultima Thule. The Sun is not more than a very bright star, you can see how New Horizons is approaching… 🙂 To the left you see a “moonlet” orbiting Ultima Thule, for a while the scientists thought there could be one, but it is now disputed.
On New Year’s Day 2019 at 05:33 UTC, if everything goes well, New Horizons will pass Ultima Thule within about 3500 km.
New Horizons has woken up from its hibernation last month and is healthy. The coming months preparations will be made for the encounter.
It will be exciting to see how Ultima Thule looks in the real. But it will take time to transmit pictures back to Earth. It takes almost six hours for data to bridge the distance between New Horizons and Earth!
Almost ten years ago, in March 2004, the European Space Agency (ESA) launched a spacecraft with an ambitious mission: to orbit and land on a comet. The spacecraft was called Rosetta. Once in orbit around the comet, a small probe, called Philae, would be launched to make a soft landing on the comet. In this artist impression you see Rosetta in orbit and Philae on its way down to the comet.
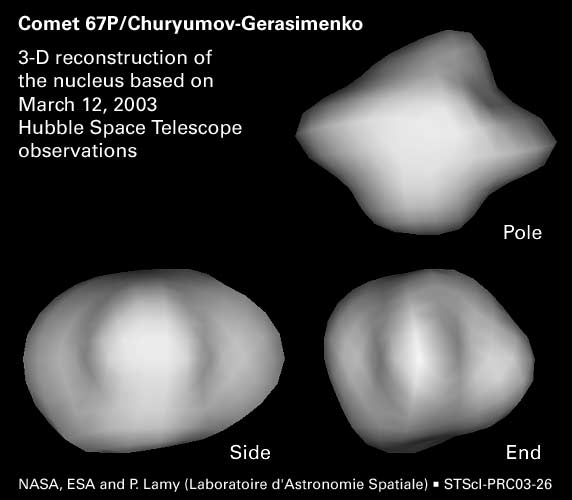
Destination of Rosetta is the comet 67P/Churyumov–Gerasimenko This “dirty snowball” as comets are sometimes called, was discovered in 1969. It has a diameter of 4 km and orbits the Sun with a period of 6.45 year. Comet orbits are very elliptical, when they are close to the sun, some of the comet material evaporates and gives rise to the famous comet tail. At the moment this comet is on its way to the Sun, reaching its closest distance (perihelion) in August 2015. Here is a model of the comet nucleus, generated from images taken by the Hubble telescope.
If everything goes as planned Rosetta will reach comet 67P/Churyumov–Gerasimenko in May 2014. A few months later, in November 2014, the probe will land on the surface of the comet. End of mission in December 2015.
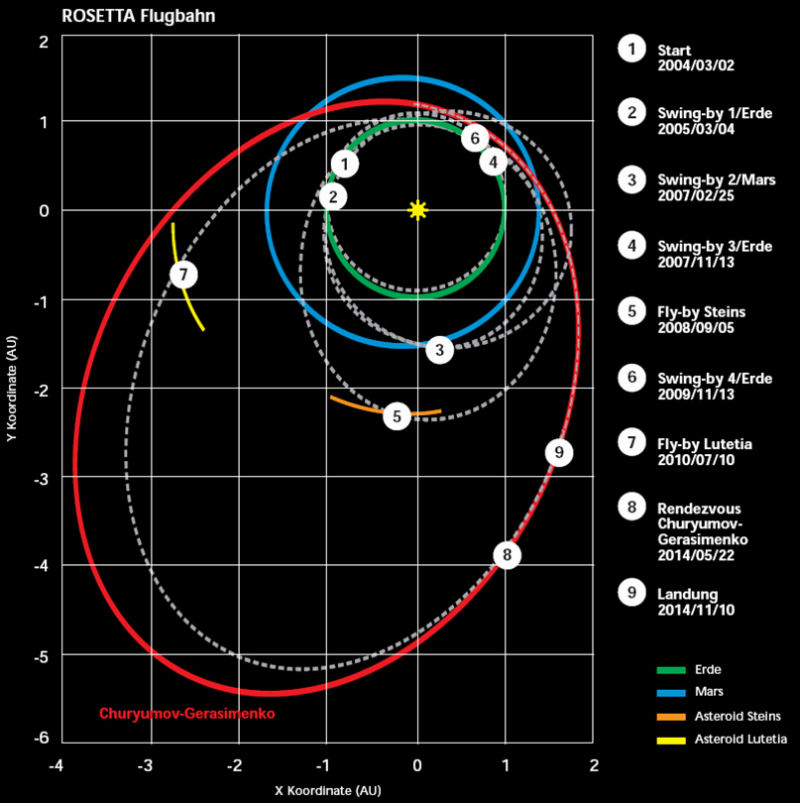
Why does it take so long to reach the comet? Have a look at this diagram, where you see the orbit of the comet (red), the orbits of Earth and Mars (green and blue) and the flight path of Rosetta (dashed line).
The reason for the complicated flight path is that it is not feasible to give the spacecraft enough speed at launch to reach its target. To give the spacecraft its required speed, one or more so-called gravitational slingshots are needed.The principle is this: steer the spacecraft close to a planet or moon. Because these objects have their own (high) speed, the force of gravitation can give extra speed to the spacecraft. A simple analogy can be found in sports. When a ball hits a stationary held tennis racket, the speed of the ball will basically remain the same (only reversed). But when the player moves the racket towards the ball, the ball will bounce back with a much higher speed.
Rosetta has used four of these slingshots, marked in the diagram above Three times with Earth (2,4,6) and once with Mars (3). Imagine how accurately the scientists have to steer!
Actually they did it in a clever way so there were a few bonuses..:-) The second slingshot by Earth (4) was performed in such a way that the path of Rosetta would cross the path of an asteroid, Steins, on 5 September 2008! Perfect to test if all equipment was still working correctly. Here is an image of this rather small (diameter ~ 6 km) asteroid, taken by Rosetta during the fly-by (5 in the diagram). Closest distance between the two ~ 800 km, distance from the Sun more than 300 million km. Amazing.
The last slingshot brought Rosetta in a very elliptical orbit, similar to the target comet. This is necessary because the spacecraft must approach the comet with a low relative speed, otherwise it can not go into orbit around the comet
Again a bonus, a spectacular one. The path of Rosetta crossed the orbit of another asteroid, a big one (diameter ~ 120 km), called Lutetia. Here is a picture. Asteroids are as old as the solar system, what an inferno it must have been in the beginning, noticing the surface pockmarked with craters.
The very elliptical orbit of Rosetta after the last slingshot, means that it is moving very far from the Sun. And it depends on the Sun for it uses solar power. The engineers came with an ingenious solution, they let Rosetta go into hibernation!
On 9 June 2011, they sent a signal to Rosetta to switch off all instruments, keeping only the main computer and some heating alive, and starting a timer. It worked, because from then on the spacecraft did not send any signals.
For more than two and a half years there has been no communication with Rosetta! The timer has been programmed to give Rosetta a wake up call on 20-1-2014 at 10.00 GMT. The wake up process will take many hours. The controlled spinning has to be stopped, the antenna has to be pointed to earth etc, etc. It is expected that the first signal should reach Earth around 17:30-18:30 GMT (Malaysia time is GMT + 8 hours).
You can follow the events on Monday 20-1-2014 via live streaming (starts 9:15 GMT):
More information can be found on the ESA Wake Up Rosetta page. They have done a good publicity job. For example they have organised a Wake Up Rosetta competition for the general public. You can create a video and submit it (until tomorrow). Here is the Facebook page where you can view the contributions. And vote for your favourite!
Tomorrow will be a nerve-wrecking and nail-biting day for many scientists!
UPDATE 21-1-2014
Rosetta has woken up! Yesterday at 18:20 GMT a big applause started in the ESA control room, when a spike appeared in the spectrum analyser. It was the first signal from Rosetta, which had traveled for 45 minutes to reach Earth, 800 million km away.. In Malaysia it was already 2:20 am but I could not sleep, had to watch…:-) Here are two screenshots from the live blog
This was a sign of life, next step will be to receive a health report. What a brilliant achievement.
Another update
A friend sent me a link to an ESA webpage: Where is Rosetta An animation of the path of Rosetta through the Solar System. Breathtakingly beautiful. You can zoom in and out, tilt, etc. The page takes time to load, but really worth the effort !